GPU分配
P: Parameters
G: Gradients
OS: Optimizer states
一般 1:1:6
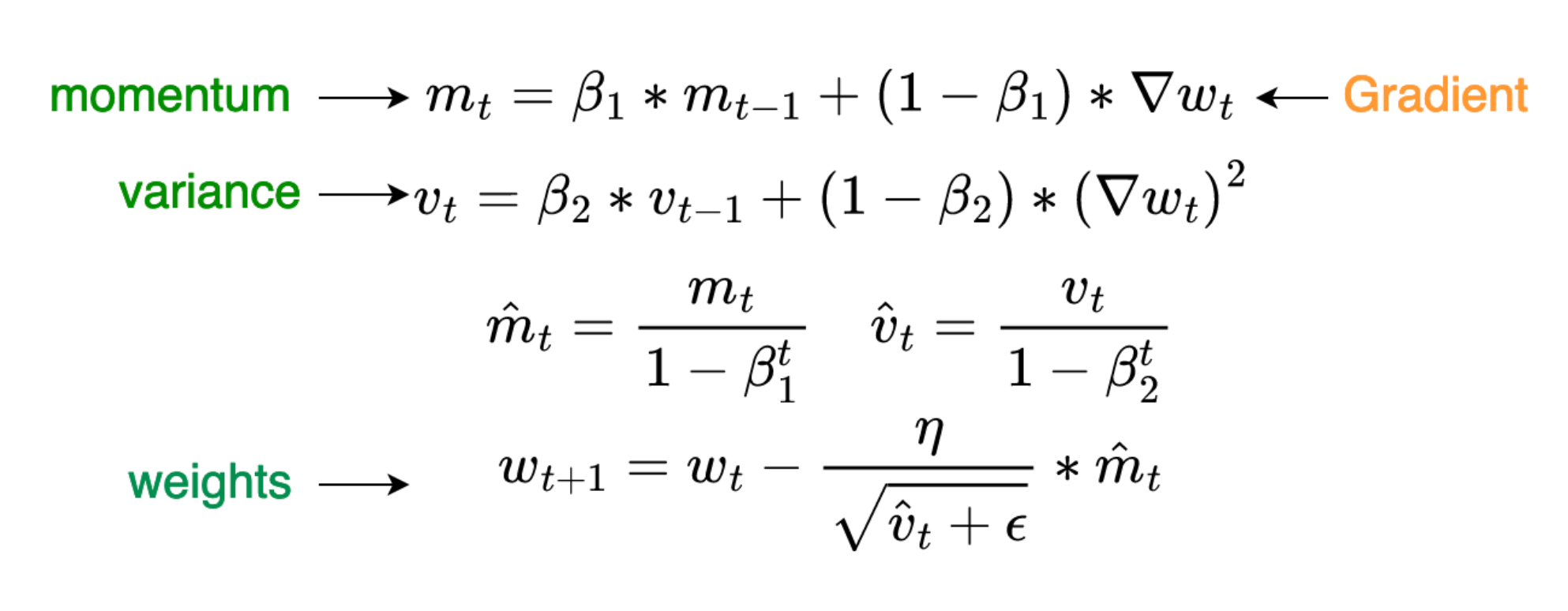
一般都和 optimizer 有关系
- 优化器的构造会封装parameters
optimizer = optim.Adam(mode.parameters(), lr=0.001) -
loss.backward() -> parameters.grad
- optimizer.step() -> optimizer stats 更新优化器状态
- momentum 一阶矩阵信息, graident 的指数平均
- variance 二阶方差信息 gradient square的指数平均
for group in optimizer.param_groups:
for p in group['params']:
state = optimizer.state[p]
# Exponential moving average of gradient values
m = state['exp_avg'] # 动量参数
# Exponential moving average of squared gradient values
v = state['exp_avg_sq'] # 方差参数
混合精度下(前向fp16 反向 更新gardients fp32):
x 个模型参数 (FP16)
parameters: 2x Gradients: 2x
Optimizer stats(Adam all in fp32) 12x = 4x + 4x + 4x
parameters copy: 4x
momentum: 4x
variance 4x
参考:https://arxiv.org/abs/1910.02054
参考这张图的BaseLine, adam 的时候K就是12 ,不同优化器可能会对应不同K
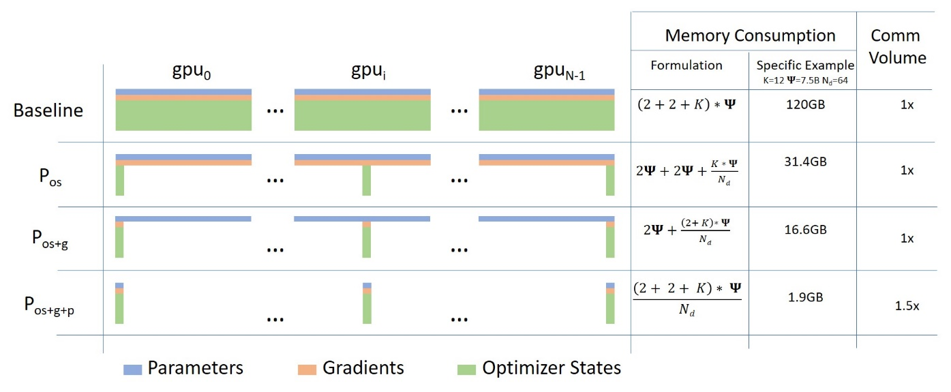
zero1 对 OS 做分区,某种意义上算是张量并行,但是只切分了OS
zero2 OS + G
zero3 OS + G + P
关于更多优化器:https://docs.pytorch.org/docs/stable/generated/torch.optim.Adam.html
NCCL 通讯库
- PCIE/NVLINk 单机多卡
- 多机多卡:IB卡
DDP并行
数据并行,每张卡都有模型
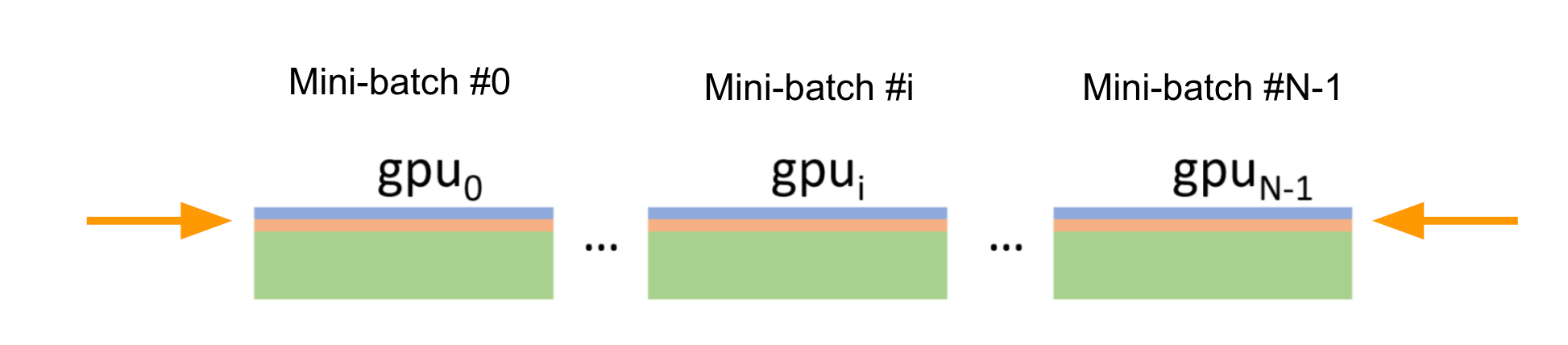
每张卡独立前向计算 独立 反向传播,计算 gradients All Reduce(gradients) - 广播 把所有的 gradients 加到一起,广播到所有的GPU上 每张卡更新优化器状态和模型参数
TP 并行,分块矩阵
pp 并行,分层并行
from torch.distributed.pipeline.sync import Pipe
# Need to initialize RPC framework first.
os.environ['MASTER_ADDR'] = 'localhost'
os.environ['MASTER_PORT'] = '29500'
torch.distributed.rpc.init_rpc('worker', rank=0, world_size=1)
# Build pipe.
fc1 = nn.Linear(16, 8).cuda(0)
fc2 = nn.Linear(8, 4).cuda(1)
model = nn.Sequential(fc1, fc2)
# chunks: number of micro-batches (default: 1)
model = Pipe(model, chunks=8)
input = torch.rand(16, 16).cuda(0)
output_rref = model(input)
FSDP
论文: https://arxiv.org/pdf/2304.11277
流程:
- 定义FSDP 的unit ,具体是什么级别 vertical 切分 layer/module/stage
- sharding horizontal 切分 OS G P
-
All gather
- Reduce Scatter
每个unit 在不同卡上做split
每个unit 做前向和反向的时候都要做一次all gather
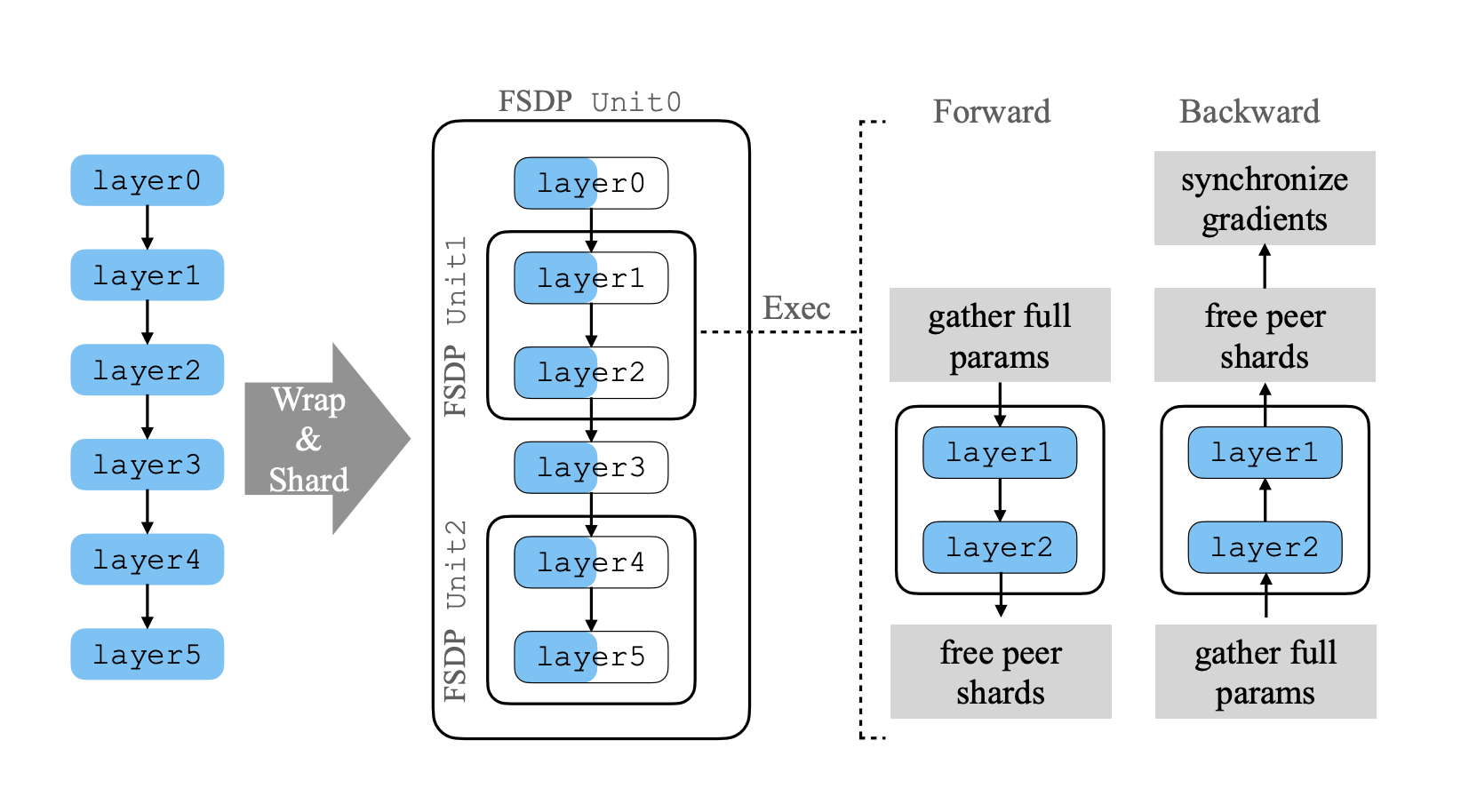
6 个layer的 model
构造了3个unit,layer0+layer3, layer1 + layer2, layer4 + layer5
共享参数的layer 应该是要放在同一个unit
split 了
蓝色代表 shard
以 unit1 的执行为例子,
前向:
先gather,因为layer1 layer2 不同的参数是分在不同的GPU上,算完之后再free
反向:
先gather,再free,再广播 gradients
- construct units 构造 units
- unit0
- unit1
- unit2
- sharding:
- 把unit 存成 FlatParameter
- split FlatParameter 到多个node/gpu
- torch.distributed.fsdp.FullyShardedDataParallel
- sharding_strategy
- FULL_SHARD: os + g + p
- shard_grad_OP: os + G
- sharding_strategy
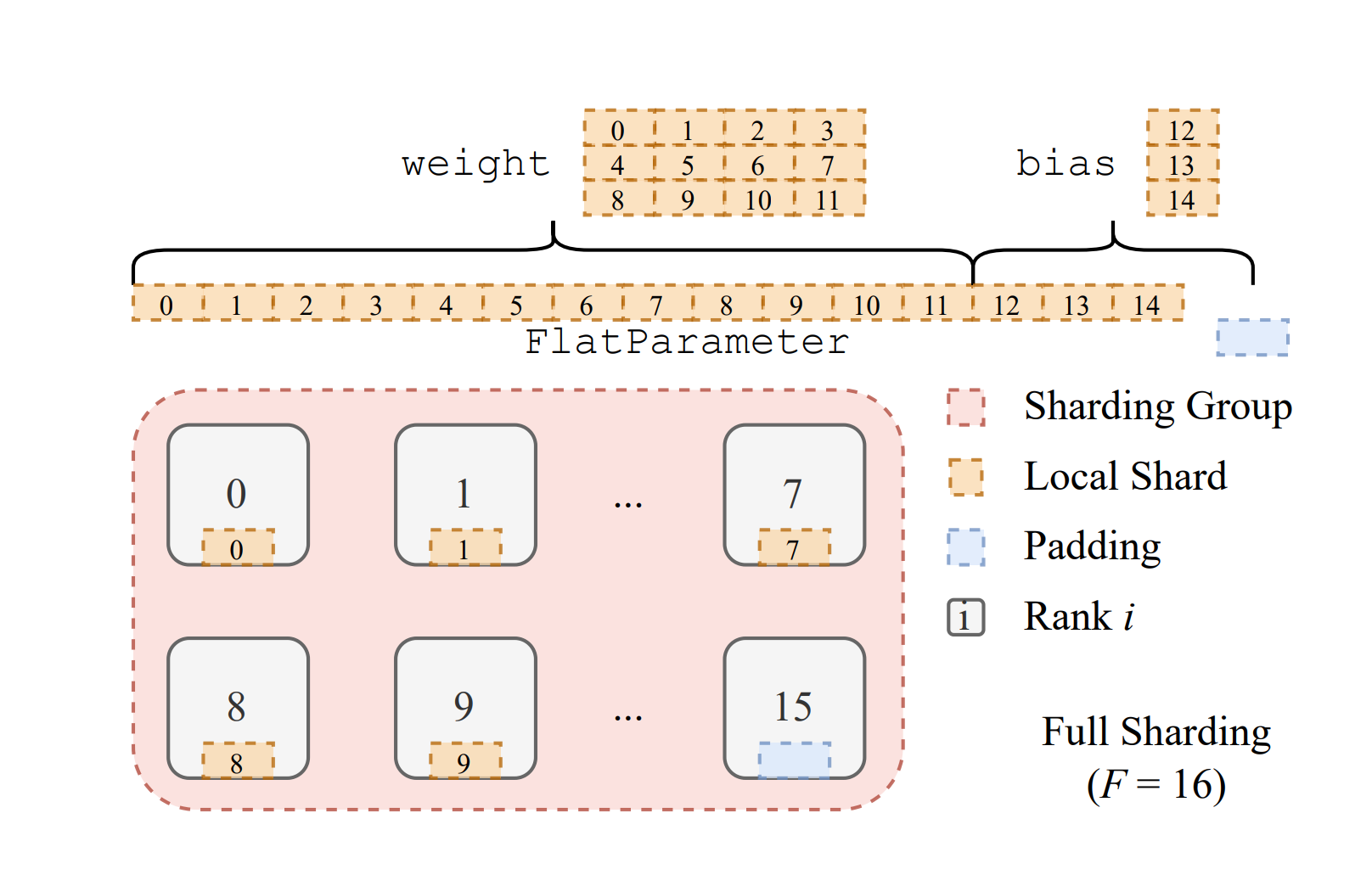
上图描述了sharding过程,
首先把 weight 和bias 都存成FlatParameter,可能会存在一定的padding
FlatParameter 存好之后,每张卡分到一份FlatParameter
ALL gather
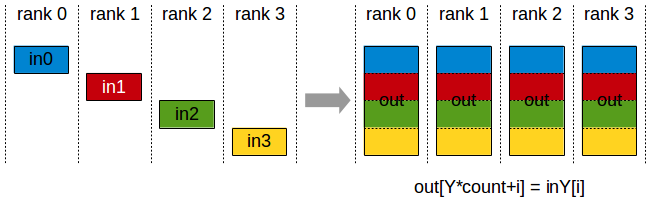
上图描述了NCCL 的all gather 原语,每张卡存了不同的shard,主要是先concat ,再做广播
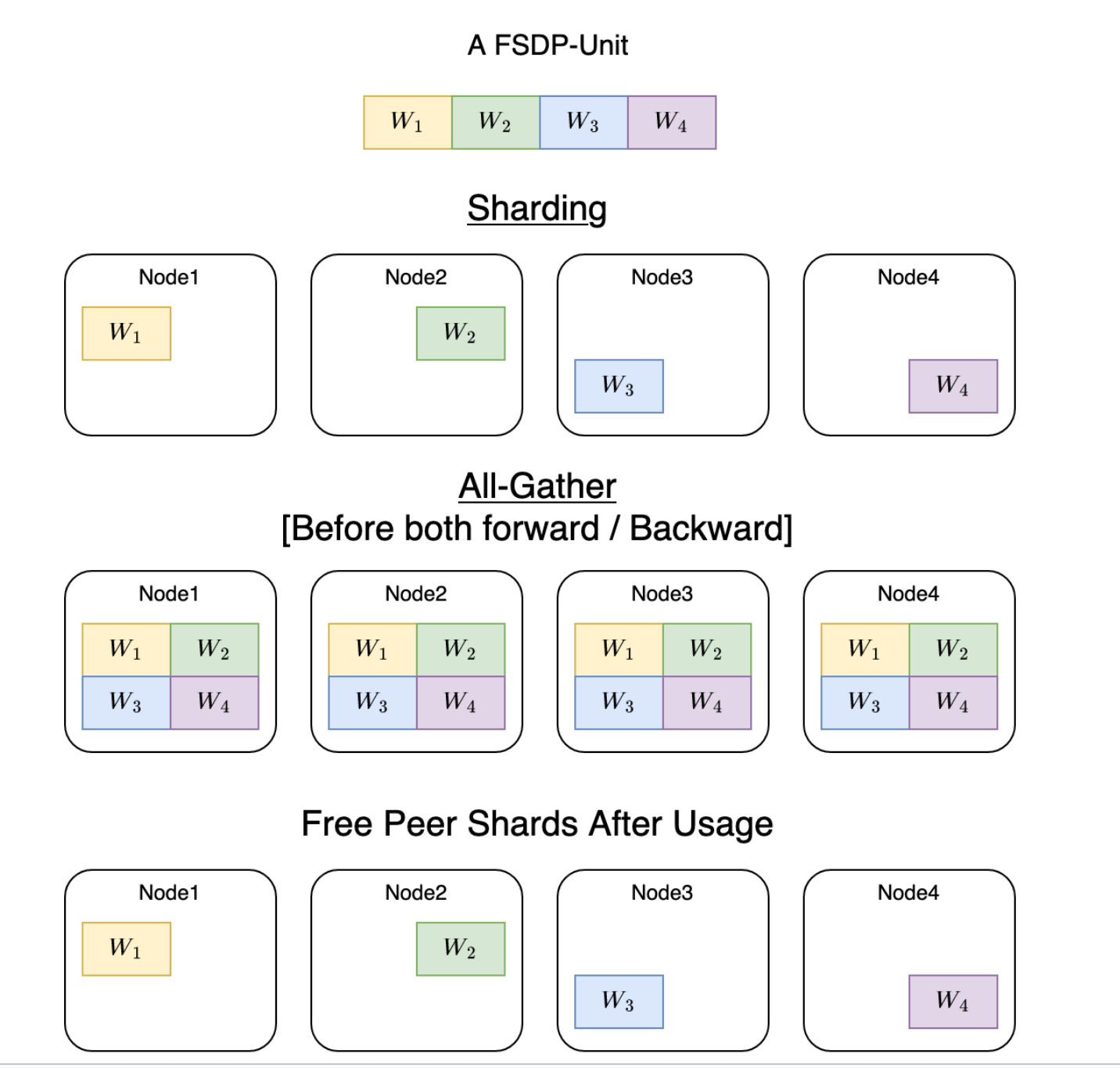
上图是fsdp ,分成了4份
前向的时候gather起来,再广播
算晚forward backward再释放
每张卡继续保留部分
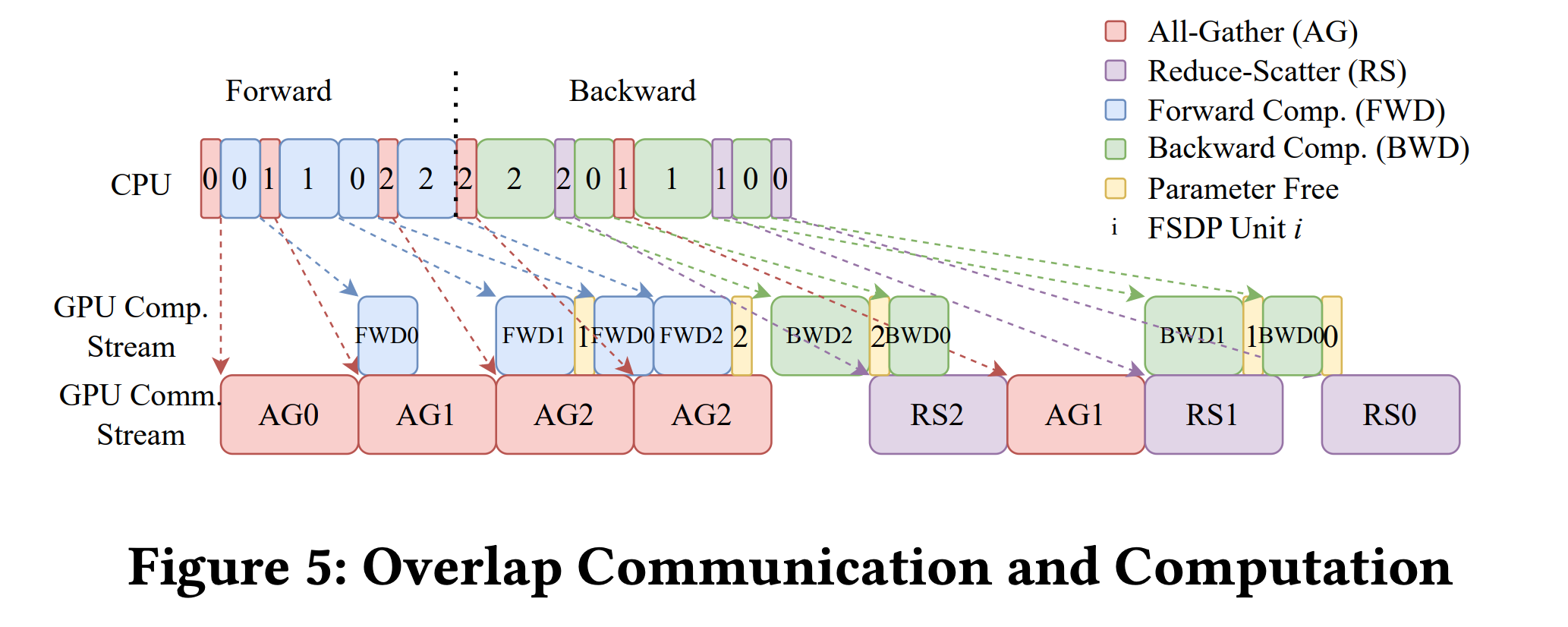
其中,这种前向反向的过程,是有一定的overlap处理的
首先,对unit0 gather, gather后算前向,算unit0前向的同时,可以对 unit1 做 gather,通信和计算可以同时进行,就是overlap
### reduce-scatter
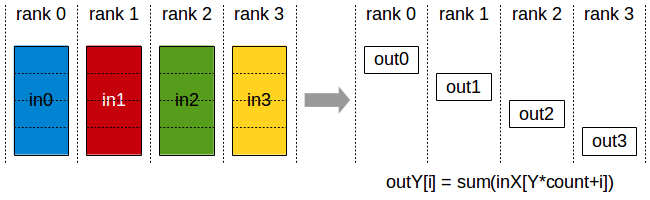
reduce 默认操作是加和,

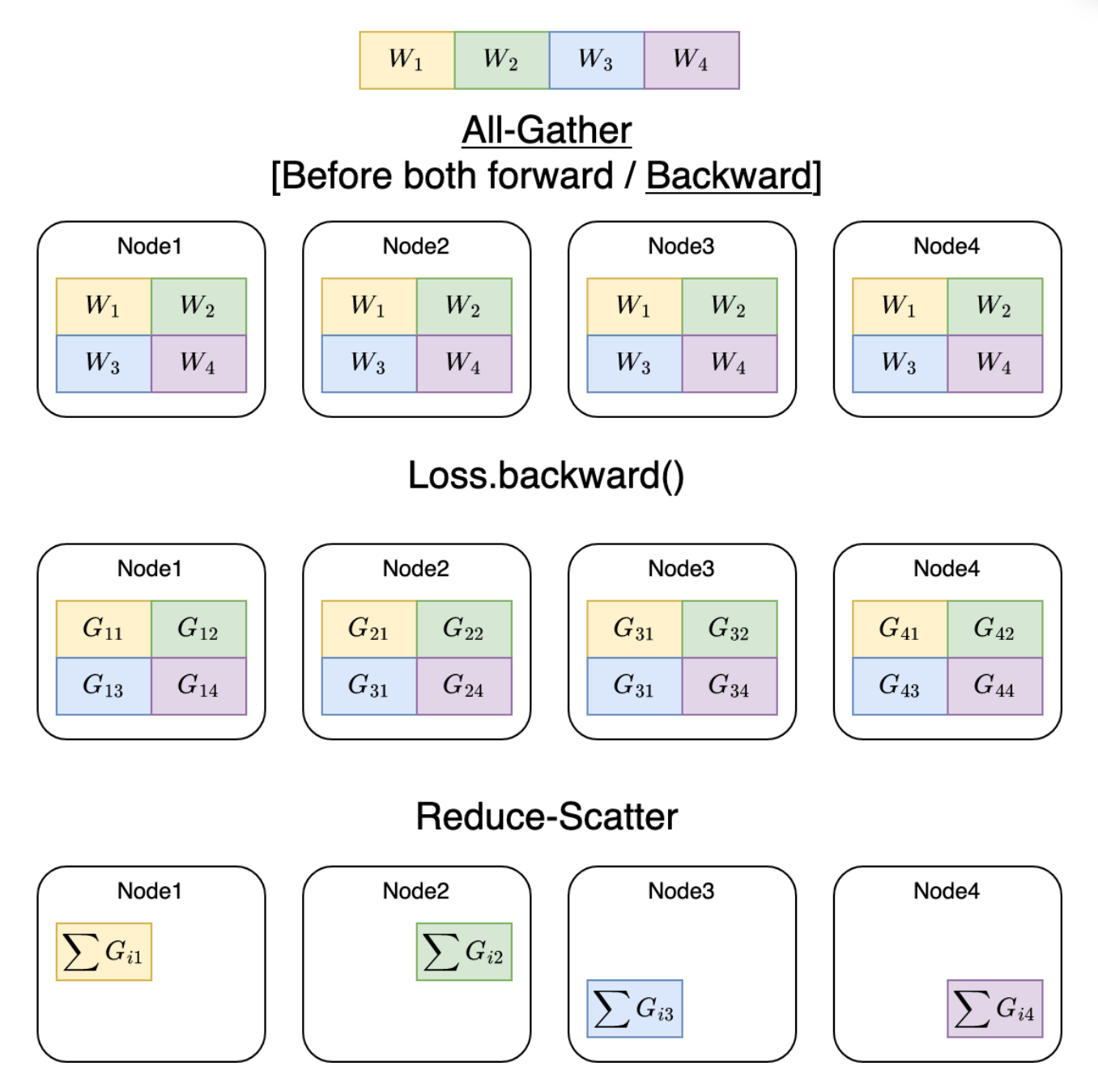
上图,gather完之后,算完不同的梯度,4卡的梯度加起来,不同的部分再分发到不同的卡上
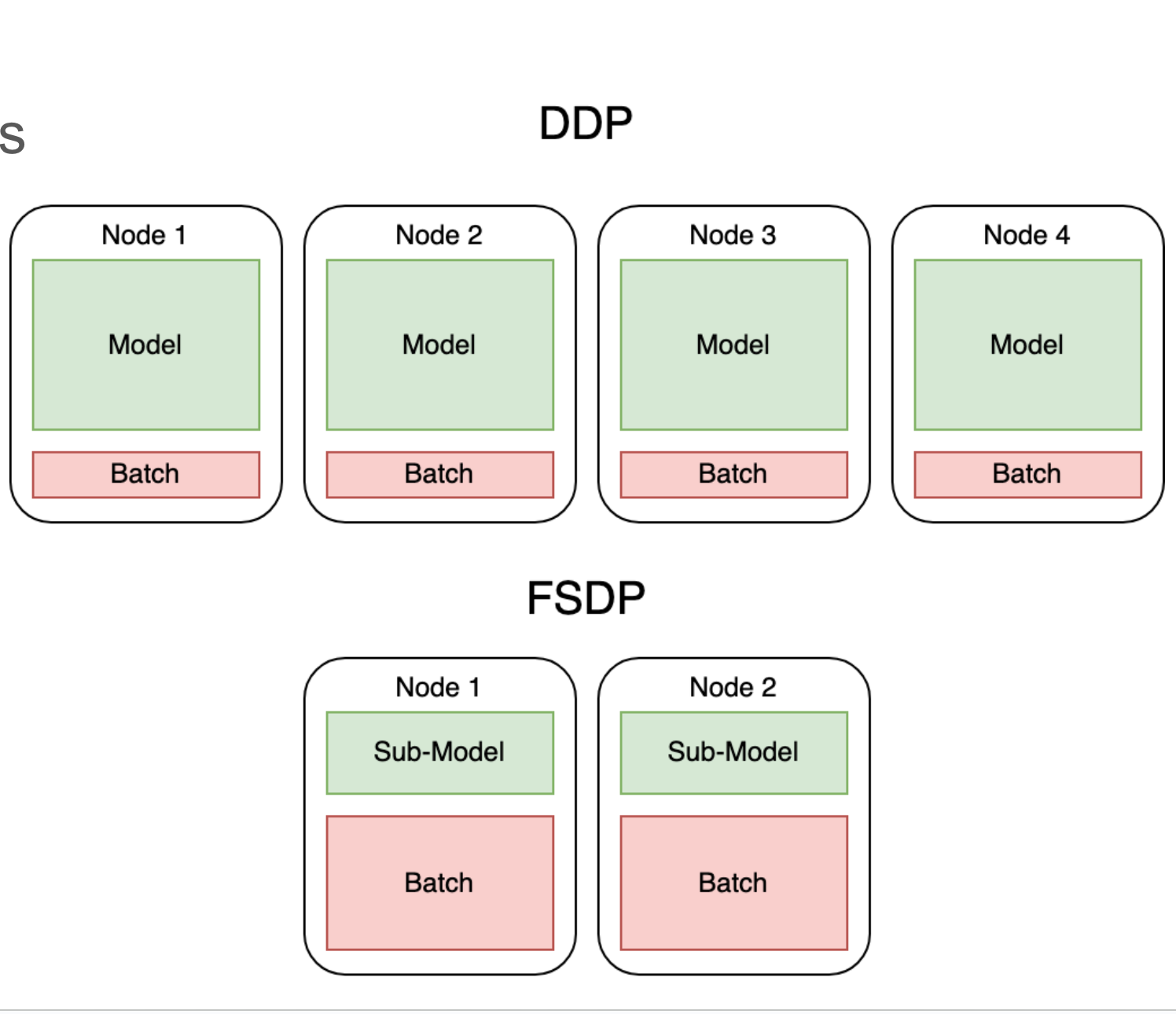
DDP 和FSDP的区别
DDP 每个GPU上都有完整的模型,FSDP 每个GPU上模型不完整,留给batch的空间较大
https://huggingface.co/docs/accelerate/concept_guides/fsdp1_vs_fsdp2
https://docs.pytorch.org/tutorials/intermediate/FSDP_tutorial.html
torch api
import torch
from torch.distributed._fsdp import FullyShardedDataParallel as FSDP
torch.cuda.set_device(device_id)
sharded_module = FSDP(my_module)
optim = torch.optim.Adam(sharded_module.parameters(), lr=0.0001)
sharded_module(input).sum().backward()
optim.step()
accelerate deepspeed torchrun 关系
accelerate 是huggingface 提供的高级api
可以选择使用 deepspeed/fsdp/megatron
QA?
fsdp 并行,虽然拆分了optimer stats 到不同的node/gpu 但是gather的时候还是要聚合的,峰值上每张卡还是会有 整个模型的parameters,Gradients 和 Optimizer stats吗
。在计算某一层时,该层的完整参数会被gather到所有参与的GPU上,所以瞬时峰值时每张卡确实会有该层的完整参数。但关键是这是逐层进行的,不是整个模型的所有参数同时存在。
https://docs.google.com/presentation/d/1ntPSYg-Wphl8sErwjUl0AztOY1i4SZmQuvmGhkeRElA/edit?slide=id.p#slide=id.p