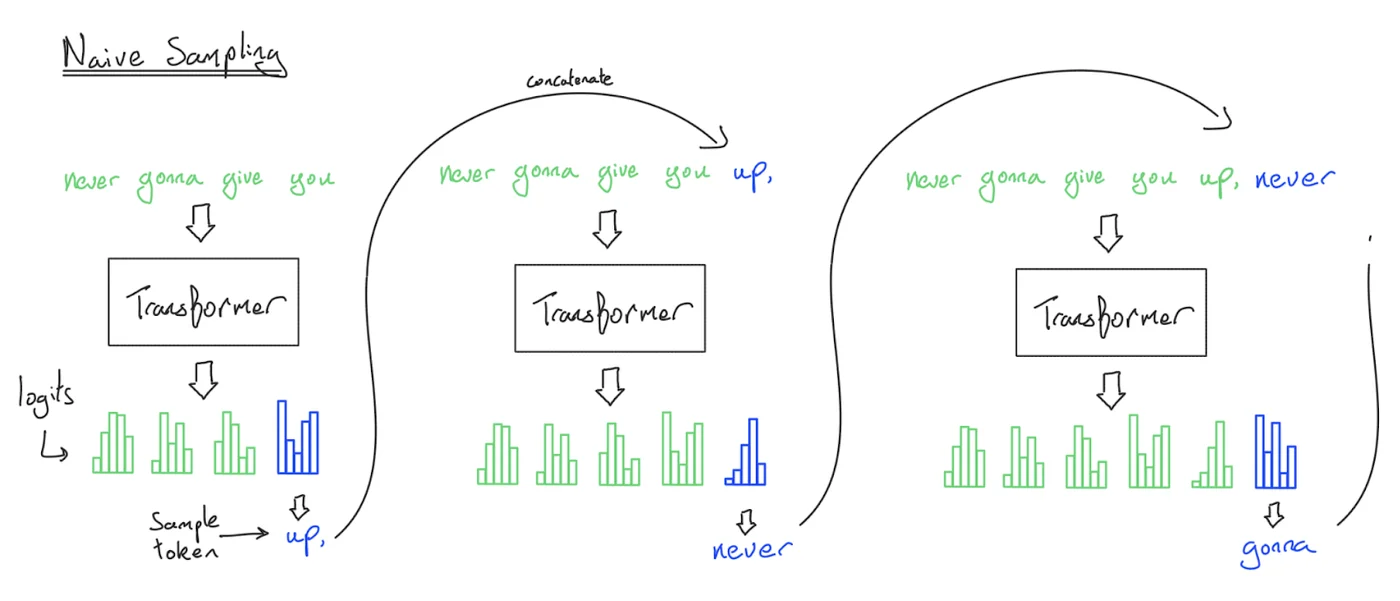
1. 先把推理过程拆开:Prefill vs Decode
同一个模型,在推理时其实有两个阶段:
- Prefill(预填充):把 prompt 一次性喂进去,算出每层的隐藏状态,同时把 K/V 写入 KV Cache。这个阶段对 prompt 的 token 可并行,形态更像训练,通常更接近 compute-bound。
- Decode(生成/解码):自回归逐 token 生成。每一步只处理 “当前 1 个 token”,需要读取(并更新)已有的 KV Cache。这个阶段通常 memory-bound,决定了 tokens/s。
2. 符号约定
2.1 变量的定义
为了方便推导,定义变量:
- B:batch size(并发请求数)
- S:上下文长度(prompt + 已生成),在 decode 时随时间增长
- T:当前这次计算处理的 token 数;prefill 时可取一段(常见
T≈S),decode 时 T=1 - D:模型隐藏维度
- L:层数
- N:Query 头数
- K:Key/Value 头数(GQA/MQA 下可能
K < N) - G:每个 KV 头共享的 Q 头数(GQA 分组大小),
G = N / K - H:单头维度,通常
D = N·H - F:MLP 中间维度(常用近似
F = 4D) - V:词表大小
Transformer 示意图:
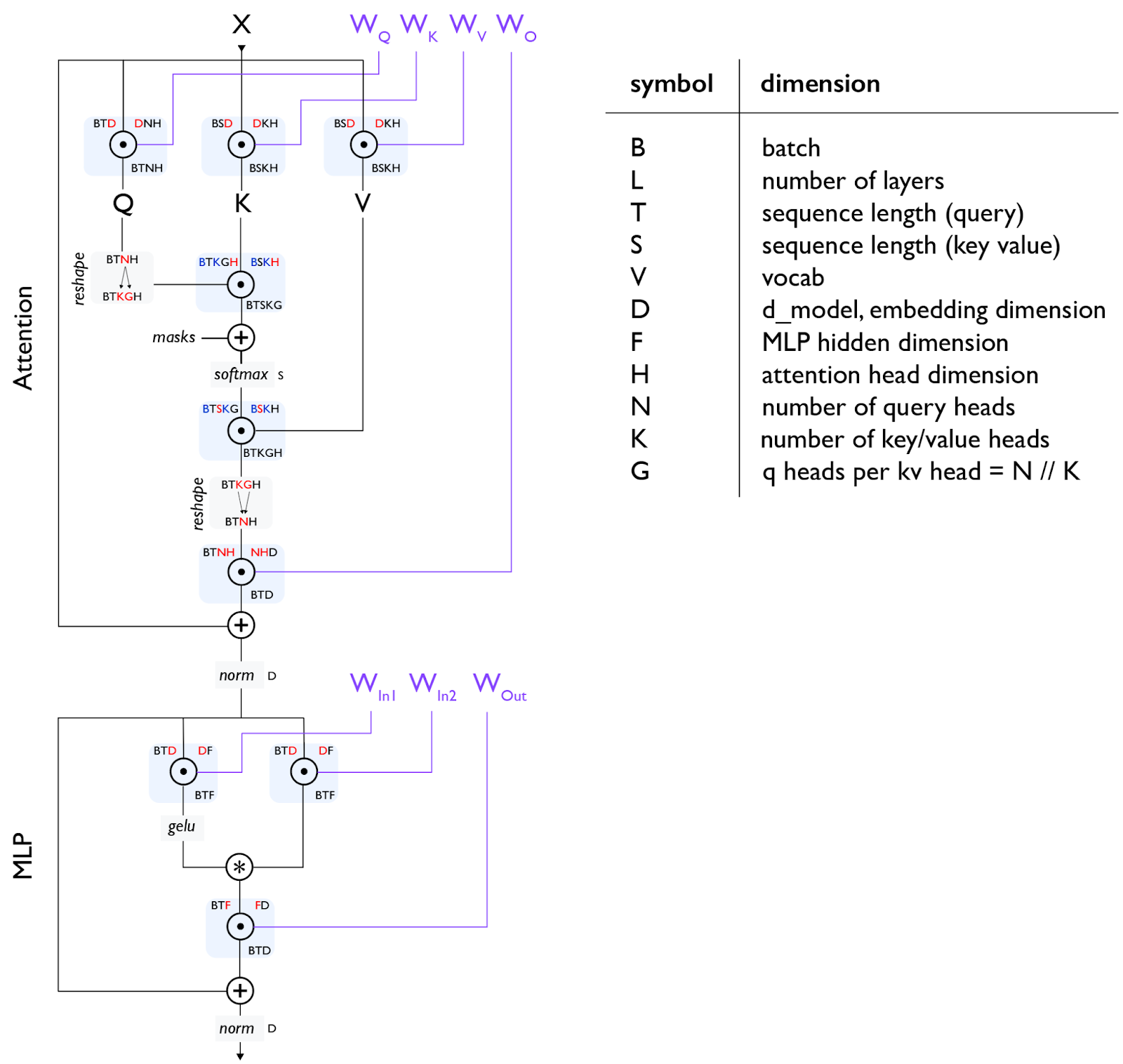
2.2 Attention 模块
这一部分是推理时 计算密集(Prefill) 与 内存密集(Decode) 的核心。
(1) 线性投影 (Projection)
输入 $X (B, T, D)$ 分别与 $W_Q, W_K, W_V$ 相乘(这里的 $T$ 表示“本次一起算的 token 数”,prefill 时通常较大,decode 时为 1):
- $Q$:维度从 $(B, T, D)$ 变为 $(B, T, N, H)$(通过 $W_Q: D \to N!H$)。
- $K, V$:维度从 $(B, T, D)$ 变为 $(B, T, K, H)$(通过 $W_K, W_V: D \to K!H$)。
- 性能要点:推理时会把本次算出来的 $K/V$ 追加写入 KV Cache,使得缓存形状随上下文增长为 $(B, S, K, H)$。由于 $K < N$,KV Cache 显存占用比传统 MHA($K=N$)显著降低。
(2) 形状变换 (Reshape for GQA)
注意图中中间的 reshape 步骤:
- $Q$ 被拆解为 $(B, T, K, G, H)$,即 $K$ 个组,每组 $G$ 个头。
- 这是为了让每组内的 $G$ 个 $Q$ 头共享同一个 $K$ 和 $V$ 头进行计算。
(3) 注意力计算 (Scaled Dot-Product Attention)
- Score: $Q \cdot K^T \to (B, T, K, G, S)$。
- Mask & Softmax: 在 $S$ 维度上做归一化。
- Context Vector: Score 与 $V$ 相乘,得到 $(B, T, K, G, H)$,最后合并回 $(B, T, N, H)$。
(4) 输出投影 (Output Projection)
- 通过 $W_O$ 将维度从 $(B, T, NH)$ 映射回 $(B, T, D)$,并加上残差连接(Residual Connection)。
2.3 MLP 模块:计算的大头
图中展示的是一种 Gated MLP 结构(常见于 SwiGLU 激活函数):
- 并行支路:输入经过两个投影层 $W_{In1}$ 和 $W_{In2}$。
- 维度从 $D$ 映射到 $F$。
- 激活与门控:其中一条支路经过激活函数(图中注为
gelu,Llama 等模型常用silu),然后与另一条支路进行 元素级乘法 (Element-wise Product, $\ast$)。 - 下投影 (Down Projection):通过 $W_{Out}$ 将维度从 $F$ 映射回 $D$。
- 性能要点:MLP 的计算量(FLOPs)通常占整个 Transformer Block 的 2/3 左右,但它的权重访问是静态的,不涉及 KV Cache 的动态增长。
3. “推理性能主线”:共享权重 vs 私有 KV
推理瓶颈的根源可以用一句话概括:
Decode 阶段每步都要“读很多、算很少”。
而“读很多”主要来自两类数据:
- 共享权重(Shared Weights):MLP/Attention 的权重矩阵,对所有请求/所有 token 都是同一份
- 私有状态(Private States):每条序列自己的 KV Cache,大小随 S、B、L 线性长。
两类层在 decode 时的性质很不一样:
- MLP 层:主要是矩阵乘(读权重 + 少量激活),权重共享 → batch 越大越划算。
- Attention 层:除了读权重,还要读“每条序列私有”的 KV Cache → batch 变大时 KV 读也同比变大,算术强度几乎不涨。
4. 为什么 decode 慢:算术强度(Arithmetic Intensity)+ Roofline
4.1 算术强度(Arithmetic Intensity)
核心概念: \(AI=\frac{\text{FLOPs}}{\text{Bytes moved}}\)
硬件视角(Roofline):当 AI 低到一定程度时,性能上限由 内存带宽决定,而不是由算力(TFLOPS)决定。
以 A100 为例(数量级直觉):
- FP16 算力 ~312 TFLOPS
- HBM 带宽 ~2 TB/s
- “跑满算力”需要的
AI约312/2≈156(ops/byte 量级)
decode 时单请求(B=1)的 AI 往往接近 1,因此会出现“算力空转、等数据”的现象。
4.2 MLP 算术强度分析
4.2.1 从一个 GEMM 看出 batch 的意义
考虑矩阵乘 Y = XW,其中 X∈R^{B×D},W∈R^{D×F}:
- FLOPs:
2·B·D·F - Bytes(FP16,2 bytes):约
2·B·D + 2·D·F + 2·B·F
在推理常见的近似下(F≈4D 且 B ≪ D),2·D·F(读权重)是主项,于是:
\(AI \approx B\)
这解释了:MLP 想要更高利用率,本质上需要更大的 batch 来“摊薄读权重”。
4.2.2 MLP的Prefill 高 AI,Decode 低 AI
以 Llama 常见的 SwiGLU MLP 为例(Up/Gate/Down 三个矩阵),如果忽略算子融合带来的缓存复用,粗略估计得到:
- FLOPs:
≈ 6·B·T·D·F - Bytes:包含读写激活 + 读权重,其中推理常见近似是 读权重占主导
当 B·T ≪ D,F(模型大、当前批量小)时:
\(AI_{\text{MLP}} \approx B\cdot T\)
于是:
- Prefill:
T≈S,AI≈B·S→ 往往 compute-bound(“像训练一样快”) - Decode:
T=1,AI≈B→ 往往 memory-bound(除非 batch 大到离谱)
4.3 Attention 算术强度分析
这一节想回答一个工程上很常见的直觉:MLP 可以靠增大 batch 摊薄读权重,但 attention 在 decode 阶段几乎“吃不进 batch”。
在 FlashAttention(避免把注意力矩阵写回 HBM)的理想化分析下:
- FLOPs:
≈ 4·B·S·T·D - Bytes:
≈ 4·B·S·D + 4·B·T·D(读 K/V + 读/写 Q/Y)
得到算术强度: \(AI_{\text{Attn}}=\frac{S\cdot T}{S+T}\)
关键点:公式里没有 B,也没有 D。
两种典型场景:
- Prefill:
T=S→AI≈S/2(prompt 越长越“算得动”) - Decode:
T=1→AI≈S/(S+1)≈1(无论上下文多长都接近 1)
这就是常说的:decode 的 attention 是“天生 memory-bound”,batch 只能涨吞吐,很难涨单步利用率。
5. 推理显存、延迟、吞吐量
把推理资源拆成两块:参数 + KV Cache。
5.1 参数量(静态)
下面是一套“够用的估算”(对应 Llama/SwiGLU/GQA 的常见记法):
num_params = 2*V*D + D*F*3*L + (2*D*N*H + 2*D*K*H)*L
2*V*D:embedding + unembeddingD*F*3*L:SwiGLU MLP(Gate/Up/Down)(2*D*N*H + 2*D*K*H)*L:Attention(Wq/Wo + Wk/Wv),其中K < N体现 GQA/MQA 的节省
5.2 显存占用(动态 + 静态)
以 BF16/FP16(2 bytes)为例:
parameter_bytes = num_params * 2
# KV Cache 形状直觉:(L 层) × (S 个 token) × (K 个 KV 头) × (H head_dim) × (K/V 两份)
kv_cache_bytes_per_seq = L * S * (K*H) * 2 * 2 # (key+value) * (bf16 bytes)
total_memory = parameter_bytes + B * kv_cache_bytes_per_seq
直觉:
parameter_bytes固定不变- KV Cache 是“每条序列私有”的动态状态:decode 每生成 1 个 token,就会在每层追加一行 K/V,所以它随
B和S线性增长(以及随层数L线性增长),常常是 OOM 的主要来源 - 实际系统还会有额外开销(paged block、对齐、临时 workspace、激活等),但数量级上通常仍由
parameter_bytes与B * kv_cache_bytes_per_seq主导
5.3 延迟与吞吐(memory-bound 近似)
在 decode 阶段,很多系统的第一近似是:
latency_per_token = bytes_moved / memory_bandwidth
throughput_tokens_per_sec = B / latency_per_token
这里的 bytes_moved 建议理解为 “生成 1 个 token 这一轮 forward 在 HBM 上的总读写流量”,而 decode 之所以容易 memory-bound,关键在于每层 attention 都需要读一遍历史 KV:
- KV 读(主项):约
B * L * S * (K*H) * 2 * dtype_bytes(读 key+value) - KV 写(次项):约
B * L * (K*H) * 2 * dtype_bytes(把新 token 的 K/V 追加写入) - 权重读:MLP/Projection 权重是共享的,batch 变大可摊薄;但 attention 的 KV 是私有的,batch 变大 KV 读也同比变大,因此单步算术强度很难上去
因此会出现经典 trade-off:
- 小 B:单用户延迟低,但吞吐差、成本高
- 大 B:吞吐高,但 KV Cache 更大、排队/调度带来的延迟更高,也更容易 OOM
常见工程策略:
- 复制模型副本:吞吐近似 ×M,单 token 延迟不变(但显存也 ×M)
- 模型分片(Tensor Parallel / Sharding):把权重拆到多卡,等价于提升总带宽 → 有机会降低单 token 延迟
- 分阶段目标:TTFT(首 token)更多受 prefill 影响;tokens/s 更多受 decode 影响,两者的最优 batch 往往不同
到这里,瓶颈已经很清楚了:prefill 更像算力问题,decode 更像带宽问题。
- 减少 decode 需要搬运的字节(核心是 KV Cache)
- 在不浪费的前提下把 batch 做大(调度/内存管理)
- 让 decode 的“步数”变少(投机解码)
6. KV Cache 瘦身
目标很明确:让 B·S·L·(K·H) 这坨东西更小,从而:
- 更不容易 OOM(能塞更大 batch)
- decode 时读写更少(更低 latency / 更高吞吐)
6.1 GQA / MQA:用“共享 KV 头”换显存
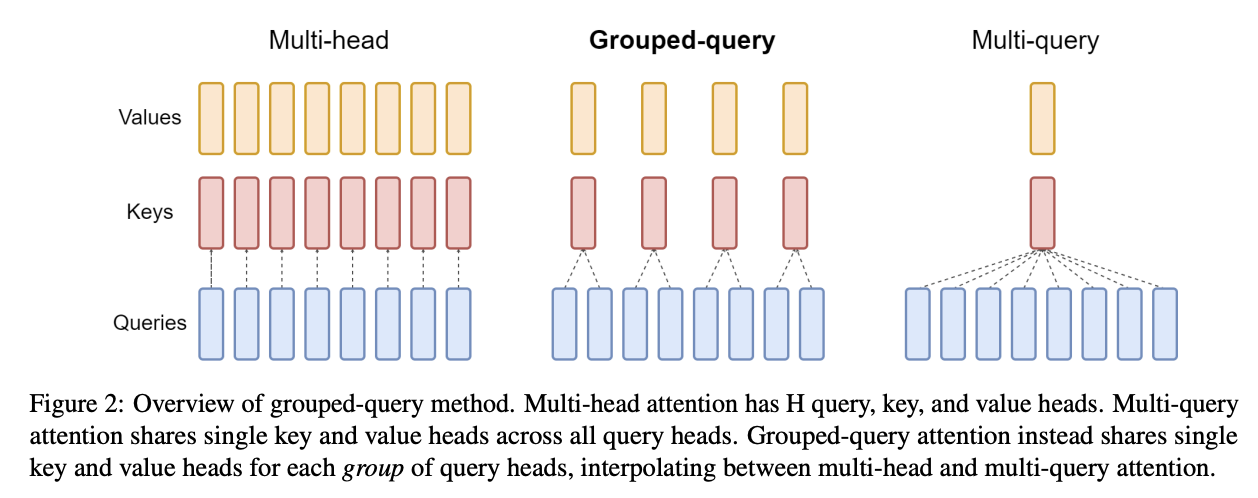
- MHA:
N个 Q 头对N个 KV 头(KV 最大) - MQA:
N个 Q 头共享1个 KV 头(KV 最小,但精度风险更大) - GQA:介于两者之间,
N个 Q,K个 KV(1 < K < N),工业界主流折中(Llama 3 / Mistral 等)
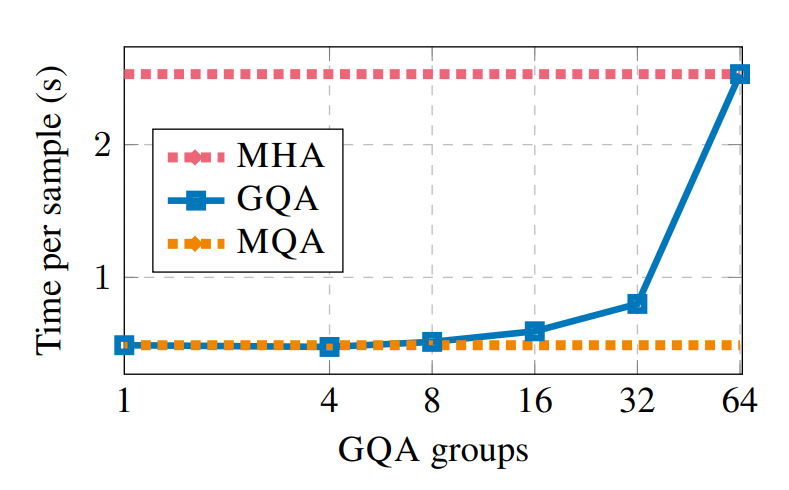
要点:GQA 本身不一定让单步 attention 变 compute-bound,但它能显著降低 KV Cache,使得 允许更大的 batch / 更少的 OOM,从而系统层面吞吐上去。
参考:https://arxiv.org/pdf/2305.13245
6.2 MLA(Multi-Head Latent Attention):把 KV 投影到低秩 latent
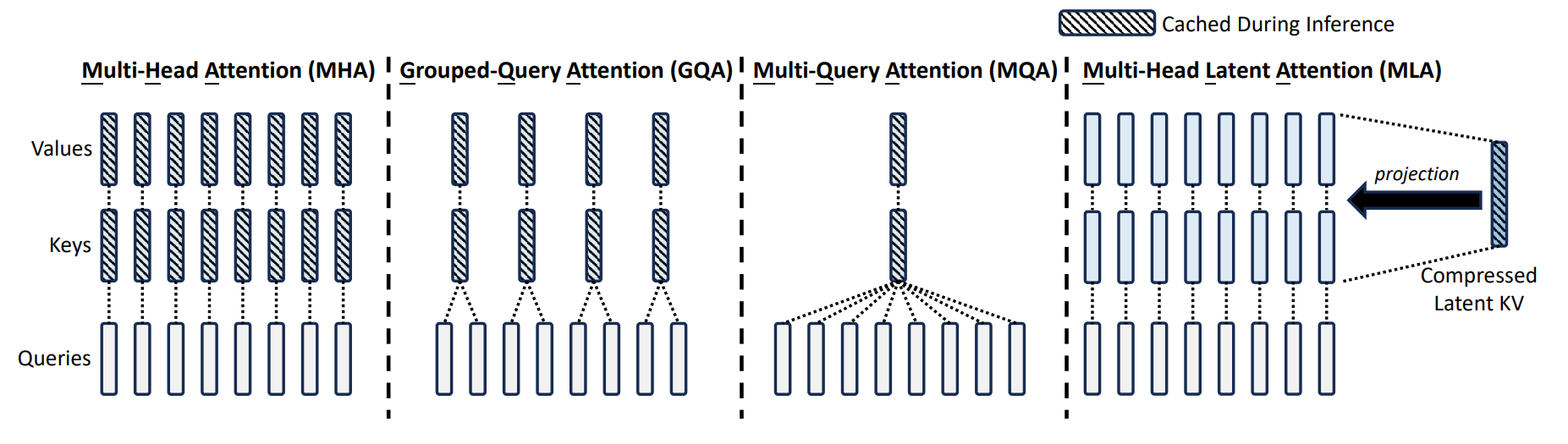
思路:不存完整 K/V,而是存一个低维 latent(比如从 N·H 压到 C),需要用时再“解码”回来(或等价地在 latent 空间完成计算)。
工程难点之一:RoPE 对位置敏感,通常需要保留一部分不压缩的维度承载位置信息(例如“压缩 512 + RoPE 64”)。
参考:https://arxiv.org/abs/2405.04434
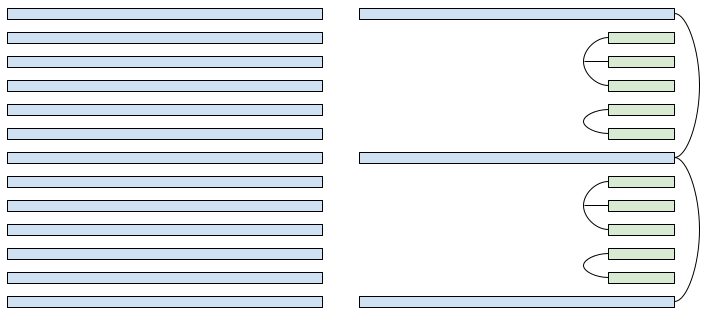
6.3 CLA(Cross-Layer Attention):跨层共享 KV
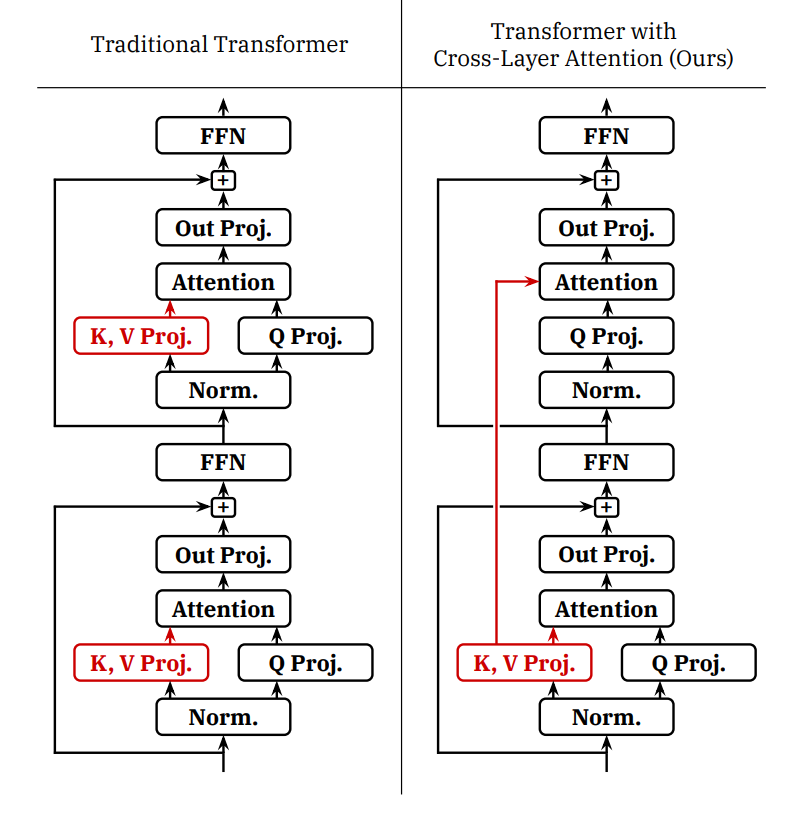
思路:GQA 是“同层头共享”,CLA 更激进:让不同层共享一份 KV(或某种共享结构),打破 KV Cache 随层数 L 线性增长的规律。
参考:https://arxiv.org/abs/2405.12981
6.4 Local / Sliding Window Attention:用“只看最近 W”换常数级 KV
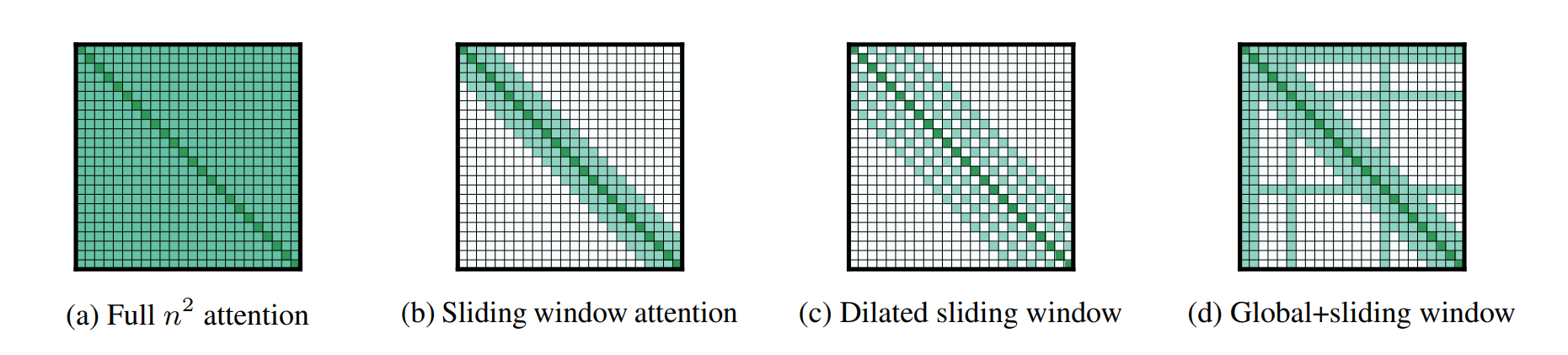
思路:每个 token 只 attend 最近 W 个 token,于是 KV Cache 不再随 S 增长,而是被窗口 W 截断:
- KV 规模从
O(S)变为O(W)(对超长上下文尤其重要) - 代价是长距离依赖能力下降
常见混合策略:大多数层用 local,少数层用 global(例如“每 6 层里 5 层 local,1 层 global”),用少量全局层保住“智商”。
参考(Longformer):https://arxiv.org/abs/2004.05150
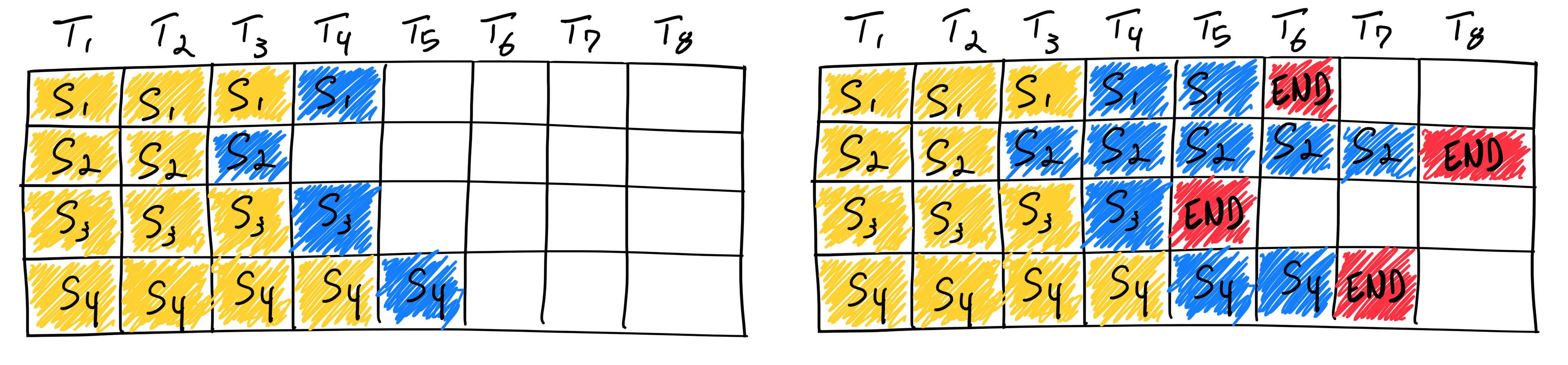
7. Batch 做大但不浪费:Continuous Batching(Orca)
上一节解决的是“KV 太大”,这一节解决的是“batch 很难一直维持得足够大”。在真实线上流量里,请求长度不一、到达时间随机,静态 batching 往往要么等人(延迟高),要么 padding(浪费算力/显存),还会被“最慢请求”拖住。
Orca 的两点核心思路:
- Iteration-level scheduling:把调度粒度从“整个请求”变成“每生成 1 个 token”。每一步结束就:
- 移除已完成请求
- 插入新到请求
- Selective batching:把不同算子按形态拆开处理
- MLP/Linear:把所有请求当前 token 的隐藏向量直接拼成一个大矩阵(flatten),避免 padding
- Attention:仍需按序列区分(或使用变长 attention kernel),避免把上下文搅在一起
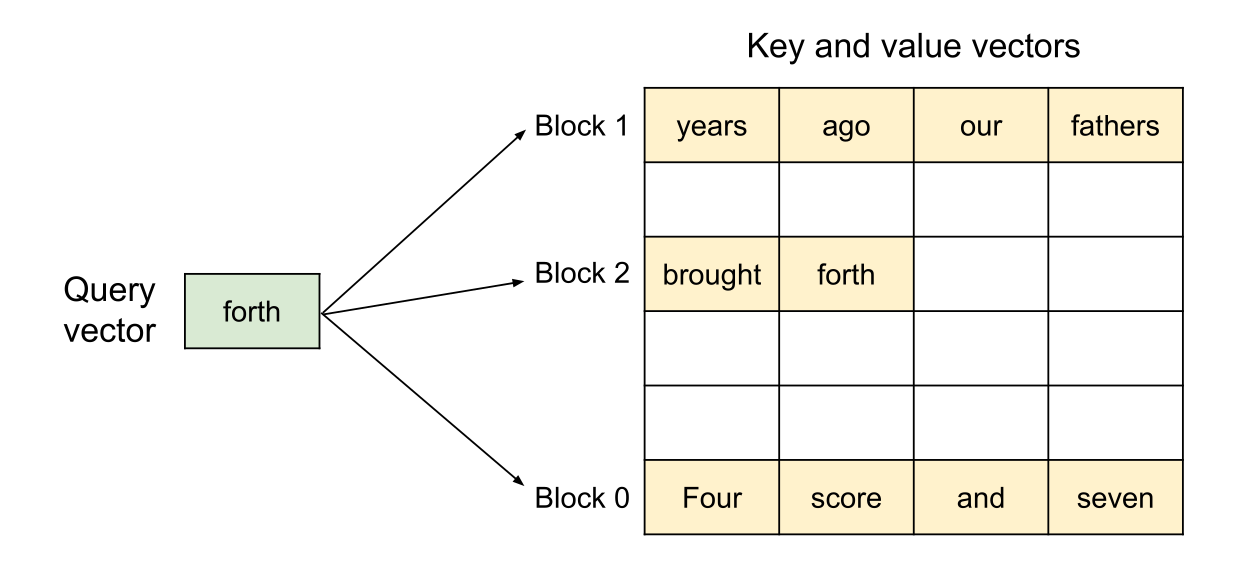
8. KV Cache 管得更省:vLLM / PagedAttention
如果说 Orca 的重点是“让 batch 持续饱和”,那 vLLM 这类系统的重点是“让 KV Cache 的分配/复用更像操作系统的内存管理”,把碎片和浪费压到最低。
在 vLLM 之前,很多系统按 max_length 预分配一整段连续 KV Cache:用户早停会导致 内部碎片;显存不连续会导致 外部碎片。

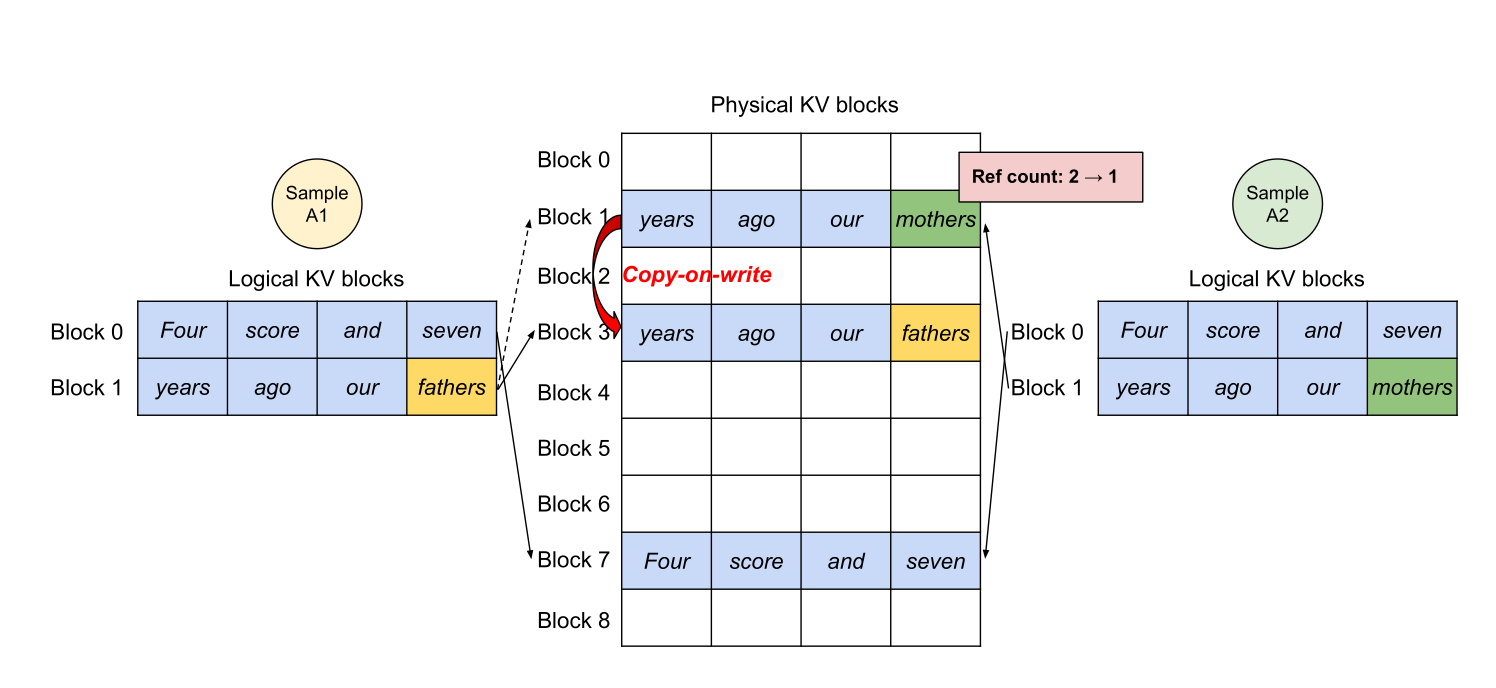
PagedAttention 的核心是把 KV Cache 切成固定大小 block(像 OS 分页):
- 按需增长:生成到哪儿就分配到哪儿
- 物理不连续:用“页表/索引”把逻辑连续映射到物理离散
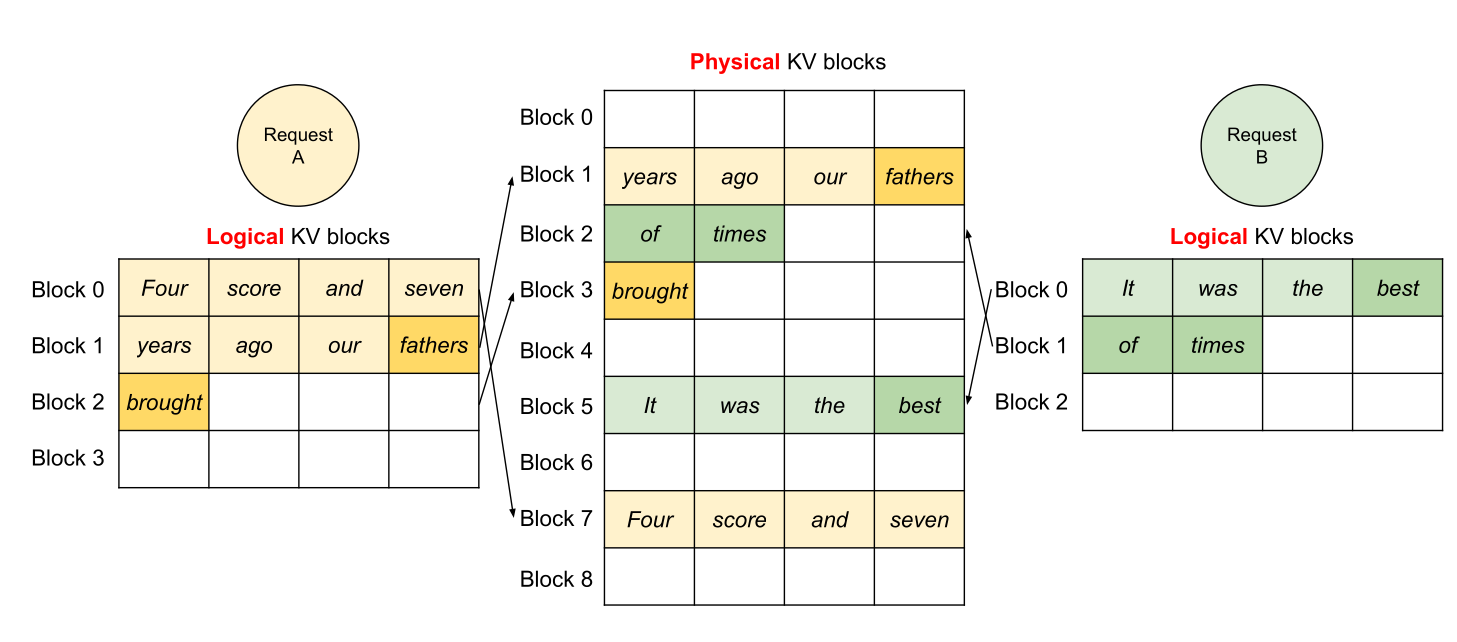
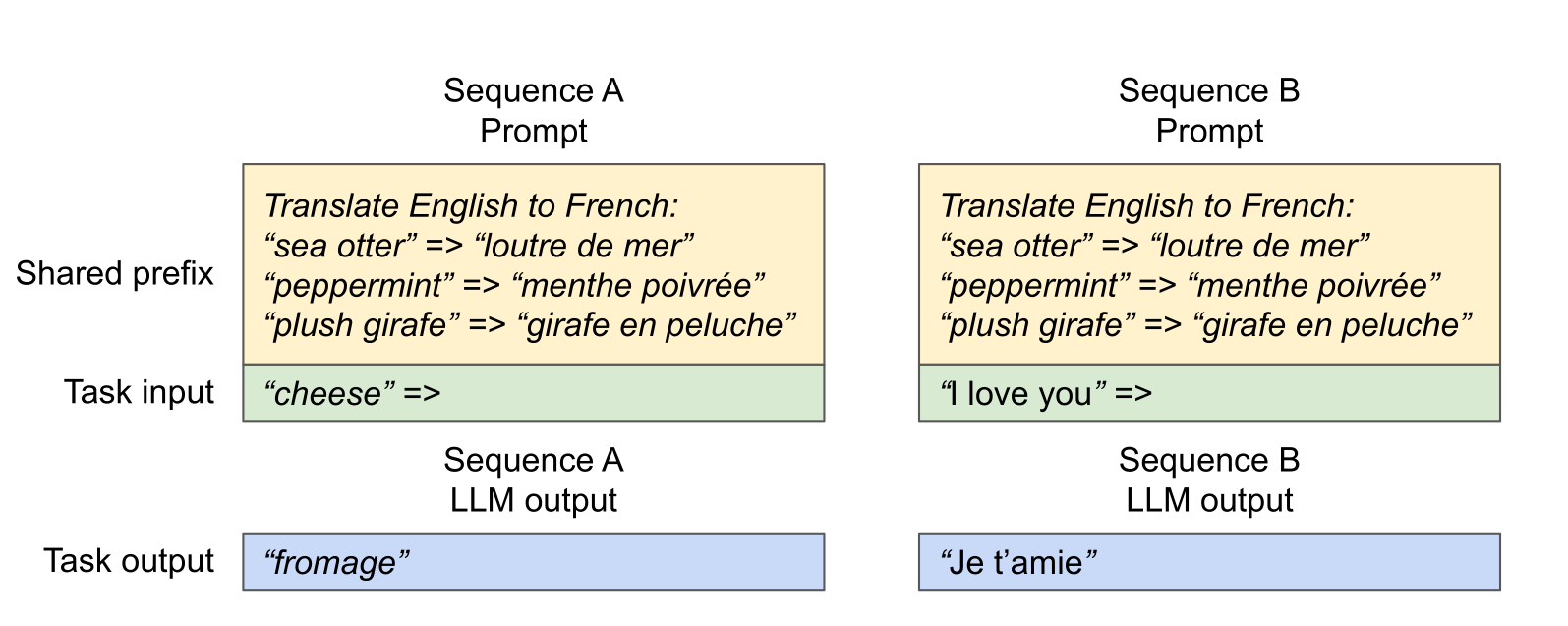
额外红利:更容易做 共享前缀(copy-on-write),例如:
- 多请求共享同一段 system prompt
- best-of-N 并行采样共享同一段 prefix
参考:https://github.com/vllm-project/vllm(以及相关论文/实现)
9. Decode 步数变少:Speculative Decoding(投机采样)
前面两条路线本质都在和“带宽墙”较劲:要么少读一点(瘦身/复用),要么把读的成本摊薄到更多并发上(调度)。投机解码换了一条思路:不改变单步 decode 的带宽属性,而是直接减少需要走的步数。
投机解码利用一个不对称性:
“验证一段 token(并行)”通常比“生成这段 token(串行)”更快。
流程(草图):
- 用小模型(draft,分布
p)快速生成接下来K个 token - 用大模型(target,分布
q)一次前向并行计算这K步的分布 - 逐步做 accept/reject:接受的 token 直接“白嫖”,一旦拒绝则按残差分布修正
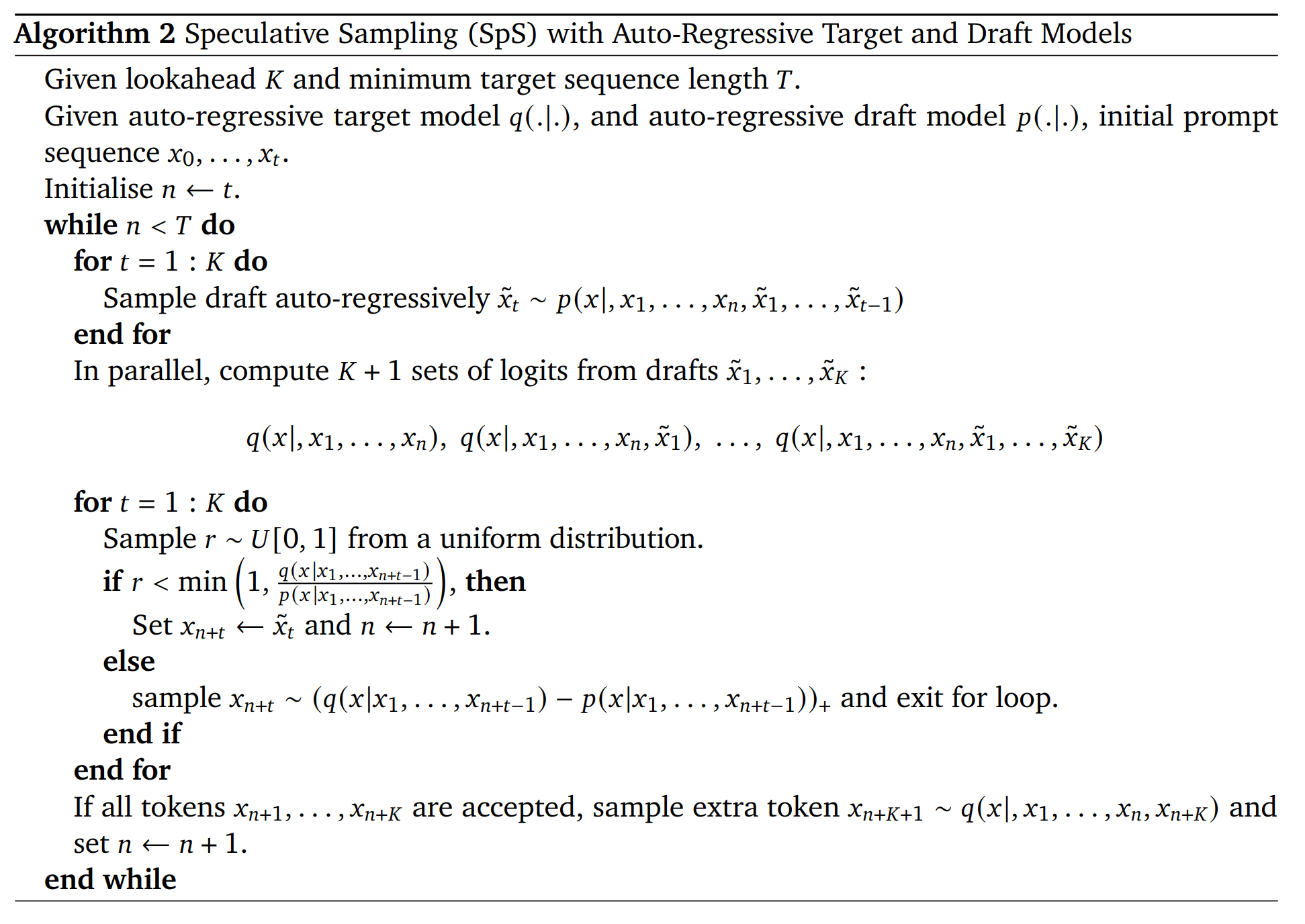
关键性质:在合适的 accept/reject 规则下,最终输出分布严格等于 q(无损)。直觉上可以理解为“多退少补”:
- draft 过采样的 token 会以概率
q/p被拒掉一部分(削峰) - draft 欠采样的 token 会从残差
max(q-p,0)中补回来(填谷)
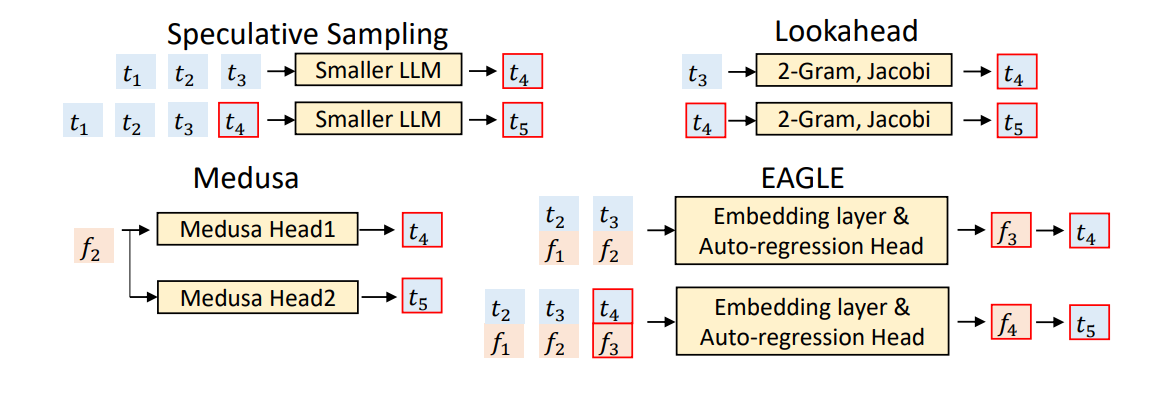
工程变体(方向感):
- Medusa:不再引入独立小模型,而是在大模型上加多个预测头一次预测多步
- EAGLE:让 draft 读取大模型中间特征,提高命中率
10. 替代 Transformer 的方向
如果把目标定为“彻底摆脱 decode 的内存墙/串行墙”,那就会出现“替代架构”。
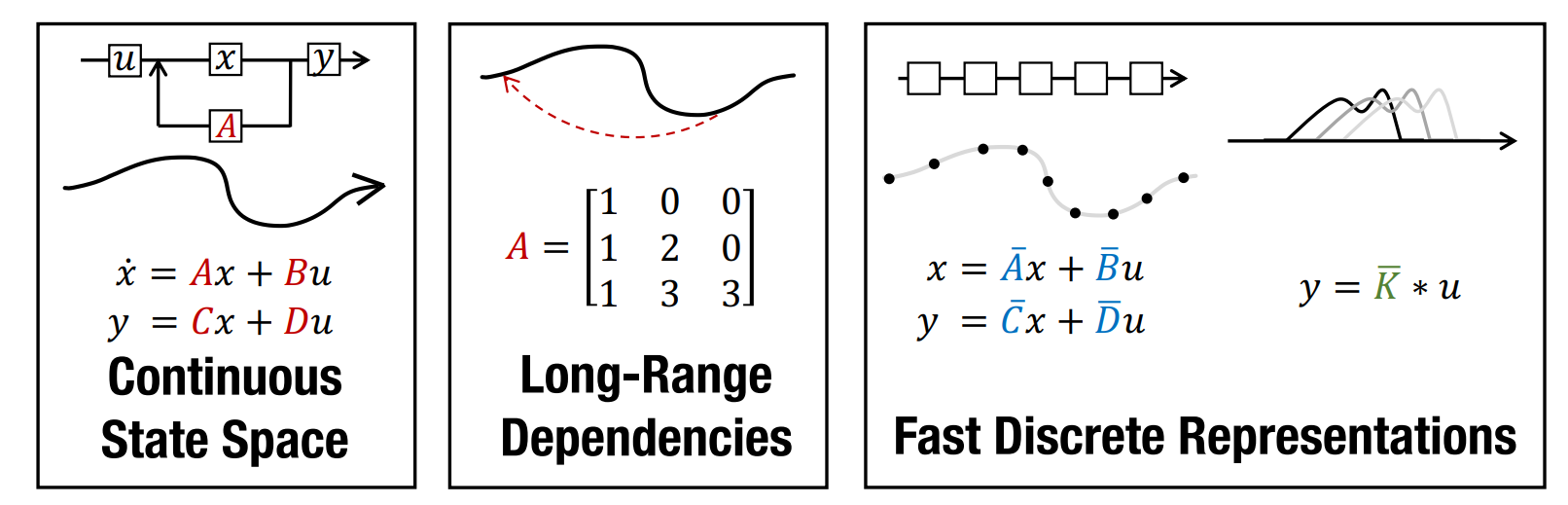
10.1 状态空间模型(SSM)/ Mamba 系列
直觉:把历史压成固定大小的状态,推理内存从 O(S) 变为 O(1),长文本生成更友好。
- S4 → 长序列合成任务强,但语言的“回忆/检索”能力弱
- Mamba → 引入输入依赖的选择机制,1B 规模能对齐 Transformer 质量且推理很快
- Jamba → Transformer + Mamba 混合(再叠 MoE),体现“混合可能是赢家”
10.2 Diffusion(文本扩散/并行生成)
思路:非自回归,不是一词一词蹦,而是多轮迭代并行“去噪”整段文本;在某些结构化任务(如代码)可能非常快。
小结:把优化手段对齐到瓶颈
- Prefill(更像 compute-bound):重点是算子融合、并行策略、提高 GEMM 利用率(本文主要把它当作“背景对照”)。
- Decode(更像 memory-bound):重点是减少 HBM 搬运与降低 KV 成本:
GQA/MQA/MLA/CLA/local→ “KV 变小/变短/变共享”。 - 吞吐不浪费:
Continuous batching解决“请求不齐导致 batch 不稳”,PagedAttention解决“KV 分配与碎片”。 - 步数更少:
Speculative decoding用“并行验证”替代“串行生成”的一部分,直接提升 tokens/s。
参考读
- Transformer 结构回顾(Scaling Book):https://jax-ml.github.io/scaling-book/transformers/
- GQA:https://arxiv.org/pdf/2305.13245
- MLA:https://arxiv.org/abs/2405.04434
- CLA:https://arxiv.org/abs/2405.12981
- Longformer(local + global attention):https://arxiv.org/abs/2004.05150
- vLLM / PagedAttention:https://github.com/vllm-project/vllm