旧方法:在大模型上直接调参(极度昂贵且缓慢)。
新方法(Scaling Laws):在小模型上调参,总结规律,然后外推(extrapolate)到大模型。
1. Scaling law 是什么:为什么 log-log 上是一条直线?
幂律(Power law)的核心形式:
\[\text{Loss} \approx A \cdot x^{-\alpha} + \text{(常数/下界)}\]为简洁起见,本文把测试集上的 loss / error(如 test loss、generalization error)统称为 “Loss/误差”,不区分具体任务指标的常数差异。
在双对数坐标系中:
\[\log(\text{Loss}) \approx -\alpha \log(x) + \log(A)\]所以看起来像“直线”。这件事非常重要:一旦“直线性”成立,很多“炼丹经验”就能变成可拟合、可外推、可做预算的工程规律。
2. 简史:从早期观察到 LLM 时代“物理定律”
- 1993/2001:已有关于数据规模与性能关系的早期讨论。
- Hestness et al. 2017:深度学习时代 scaling law 重要先驱,提出“计算受限 / 数据受限”等概念,并用学习曲线解释不同阶段的行为。
- Kaplan et al. 2020(OpenAI):把 LLM 的 scaling law 系统化,给出算力/数据/参数与 loss 的稳定幂律关系。
- Hoffman et al. 2022(DeepMind, Chinchilla):在“固定算力预算”场景下重新推导/拟合,指出当时很多大模型(包括 GPT-3)在配比上“虚胖”,应使用更小模型+更多数据。
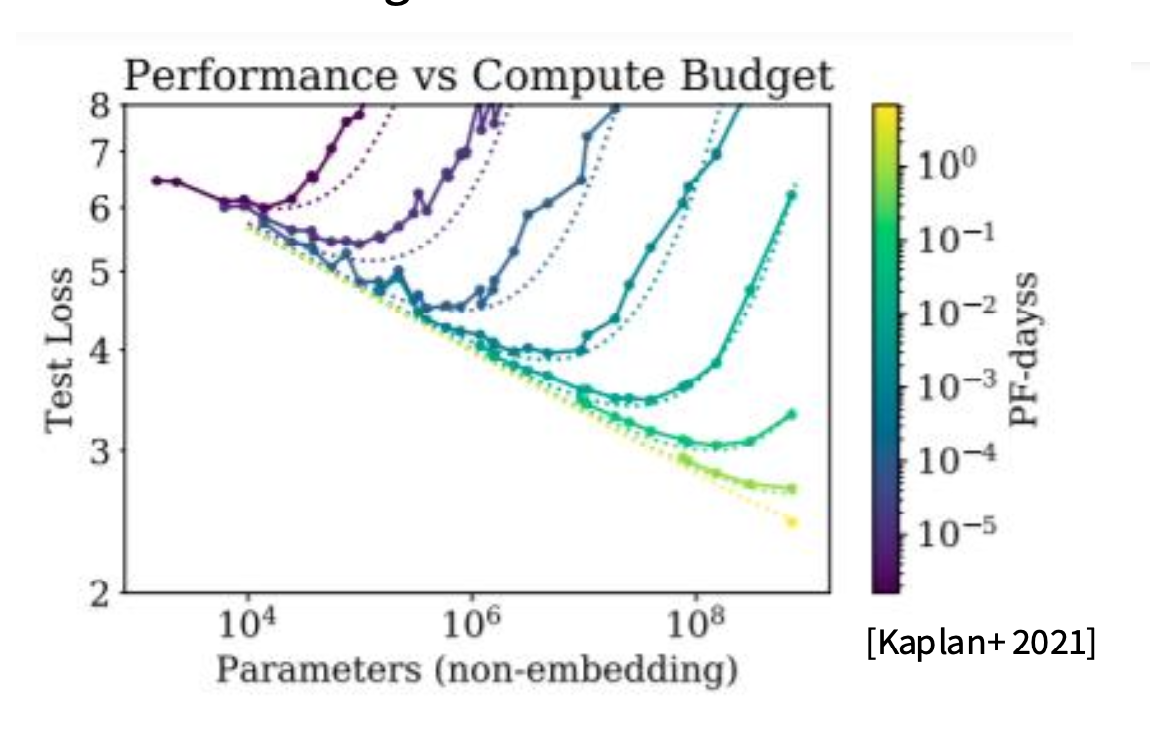
3. Kaplan 2020:三大要素的幂律关系(Compute / Data / Params)
这张图几乎奠定了 scaling laws 在大模型里的“工程学地位”:
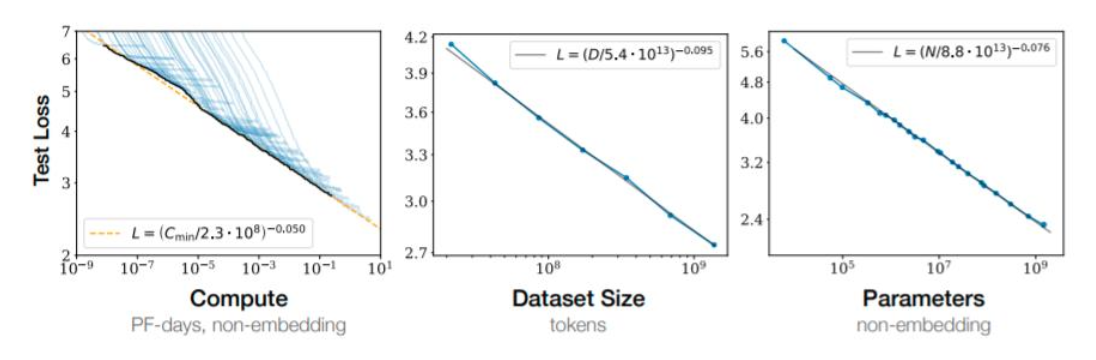
在合适的训练设置下,测试集 loss 与三类资源满足稳定幂律(指数来自课堂材料):
- 算力(Compute, $C$)
- 结论:算力越多,能达到的最优 loss 越低(包络线/envelope)。
- 经验形式:$L \propto C^{-0.050}$。
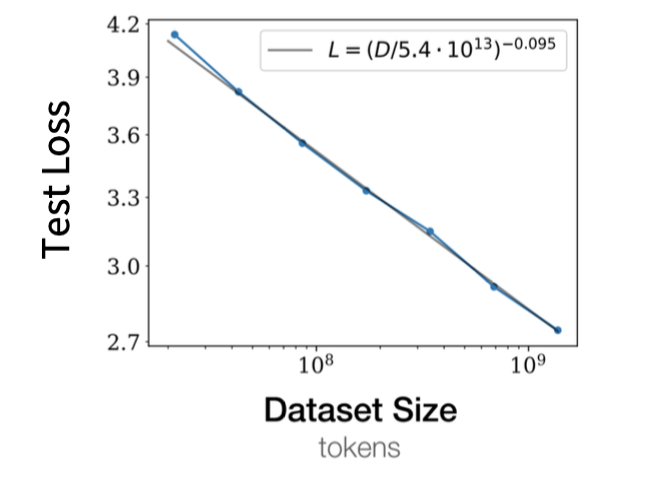
- 数据量(Dataset size, $D$)
- 前提:模型足够大,不是瓶颈。
- 经验形式:$L \propto D^{-0.095}$。
- 参数量(Parameters, $N$)
- 前提:数据足够多,不是瓶颈。
- 经验形式:$L \propto N^{-0.076}$(常见口径:不计 embedding)。
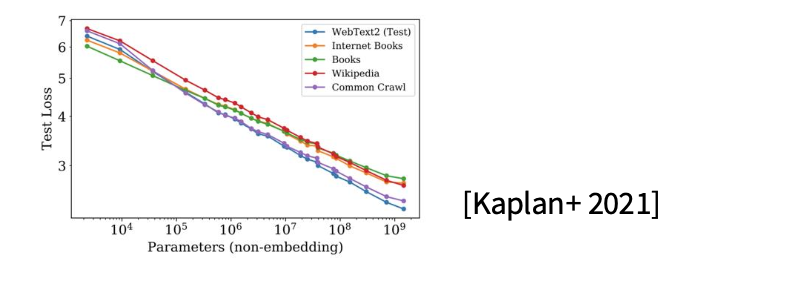
3.1 关键观察:跨分布时“平行线”
Kaplan 还强调了一个对泛化很关键的现象:即使训练分布与测试分布不同(train ≠ test),缩放趋势仍基本成立,差异多体现为截距变化而非斜率变化。
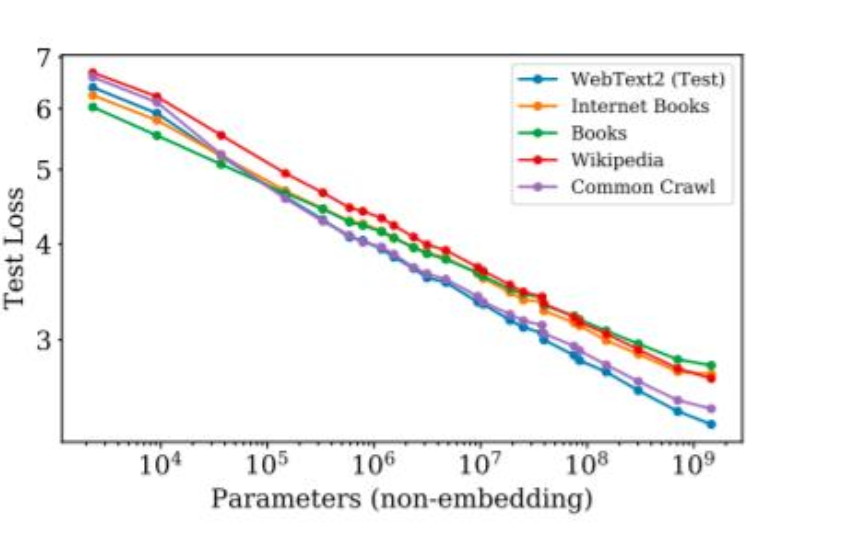
直觉:换一个更难的测试域,相当于整条线整体上移(更高 loss),但“变大带来的收益速率”相近。
4. 数据缩放:三阶段学习曲线(以及为什么斜率看起来很慢)
4.1 更完整的视角:不是永远幂律,而是“三阶段”
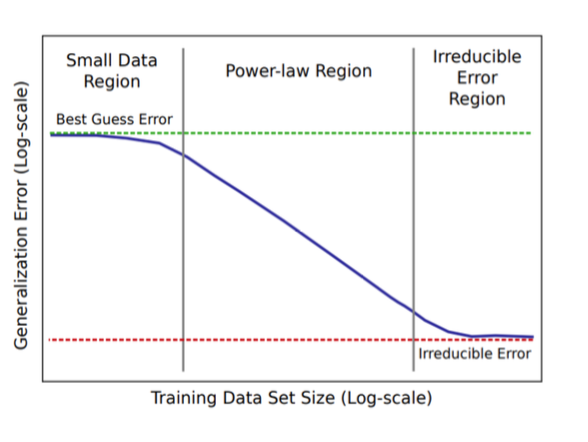
Hestness 2017 的学习曲线常被概括为类似 Logistic 的三阶段(在 log-log 下的形态):
- 小数据区(Small data):几乎学不到规律,像“瞎猜”,曲线平。
- 幂律区(Power-law):双对数下近似直线,这是我们最关心的区域。
- 不可约误差区(Irreducible error):受噪声、任务不确定性、Bayes error/熵下界影响,曲线再次变平。
对于语言模型,幂律区经常表现得非常“直”:
4.2 一个最简单的推导:为什么会出现直线?
先看一个极简统计任务:从 $N(\mu,\sigma^2)$ 采样 $n$ 个点,用均值 $\hat{\mu}$ 估计 $\mu$。
均方误差: \(E[(\hat{\mu}-\mu)^2]=\frac{\sigma^2}{n}\)
两边取 log: \(\log(\text{Error})=-\log(n)+2\log(\sigma)\)
在 log-log 图上就是斜率为 -1 的直线。更一般地,任何 $1/n^\alpha$ 的多项式衰减都会呈现“缩放直线”。

4.3 为什么神经网络的幂律斜率很小?(维数灾难直觉)
对神经网络更像“非参数估计”:不是估计有限维参数,而是在高维空间里逼近函数。一个直观的“切方块(box method)”思路能给出:
在 $d$ 维空间中, \(\text{Error} \propto n^{-1/d} \quad \Rightarrow \quad \log(\text{Error})=-\frac{1}{d}\log(n)+C\)
所以:
- 有效维度 $d$ 越大,斜率 $-1/d$ 越接近 0(曲线越平,进步越慢)。
- 语言/视觉任务的内在维度往往很高,这会让 $\alpha$ 看起来“小得合理”。
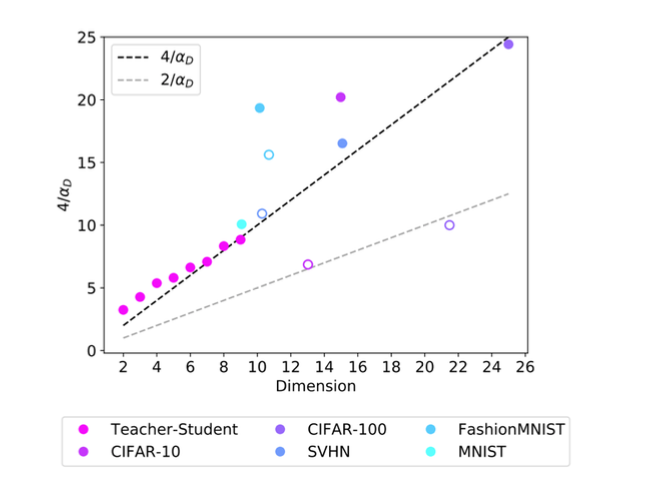
Bahri et al. 2021 尝试用真实数据集验证“$\alpha \propto 1/d$”的趋势(但也提醒:内在维度估计本身并不牢靠):
5. 数据“怎么选”比“堆多少”更早影响收益:质量、构成与分布偏移
5.1 金科玉律:数据构成影响 offset,不太影响 slope
Data composition affects the offset, not the slope.
(数据质量/构成主要改变截距,不显著改变斜率。)
直觉类比:两个人跑步速度一样(斜率相同),但起跑线不同(截距不同)。高质量数据让你“从更靠前的地方起跑”。
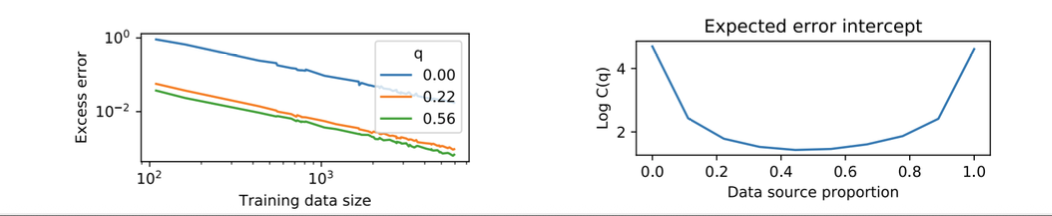
5.2 分布偏移与混合数据:存在“最佳配比”
Hashimoto (2021) 讨论了训练/测试分布不一致时的情况:平行线依旧常见,但截距会因为分布不匹配而上移;混合多个数据源时,截距常呈现 U 型并存在最优点。
工程启示
- 坏数据无法靠“扩大规模”高效弥补(斜率差不多,offset 太高会很亏)。
- 数据清洗/筛选相当于把整条曲线整体下移,是“便宜”的提升。
- 多样性很关键:适当混合数据源能降低分布偏移带来的截距惩罚。
6. 现实修正:数据有限时的重复训练与“有效数据量”
当高质量数据用完,被迫多 epoch 重复时,会出现明显的收益递减:
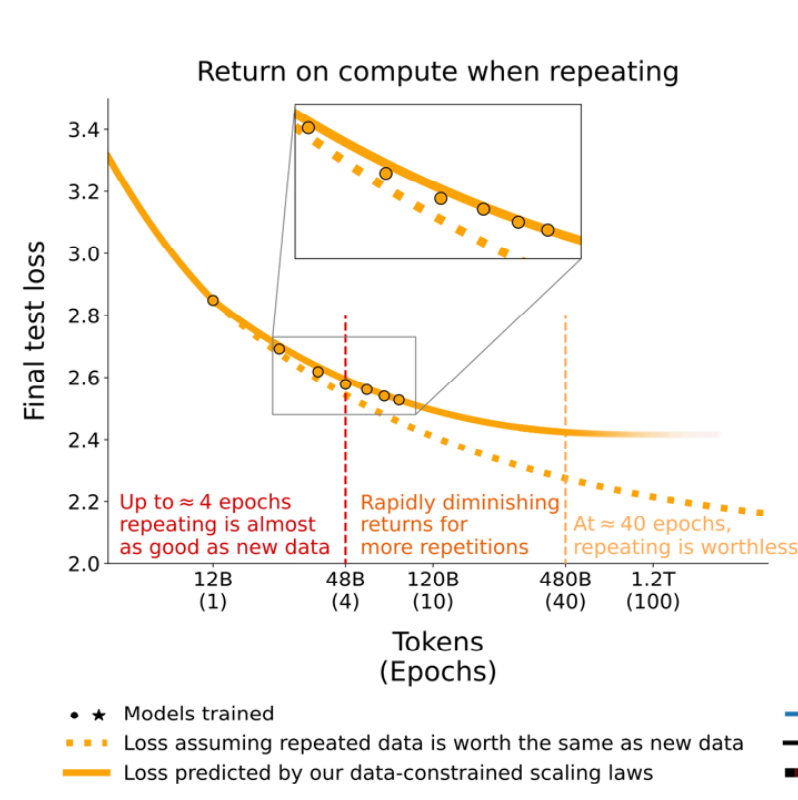
经验法则(课堂给出的口径):
- 重复到约 4 epochs:效果接近“新数据”。
- 重复到约 40 epochs:几乎“worthless”,泛化收益很差。
6.1 用“有效数据量”修正
一种修正写法(指数饱和):
\[D' = U_D + U_D R_D^* \left(1 - e^{-R_D / R_D^*}\right)\]- $D’$:有效数据量(模型“感觉”学到的量)。
- $U_D$:唯一 token 数(原始数据规模)。
- $R_D$:重复次数(epochs)。
- $R_D^*$:饱和尺度(多大程度开始明显递减)。
6.2 数据受限时,算力怎么花?
在固定算力预算下,如果数据受限且必须重复,最优点会从“更小模型+更多 tokens”移动到“更大模型+更少 tokens”:
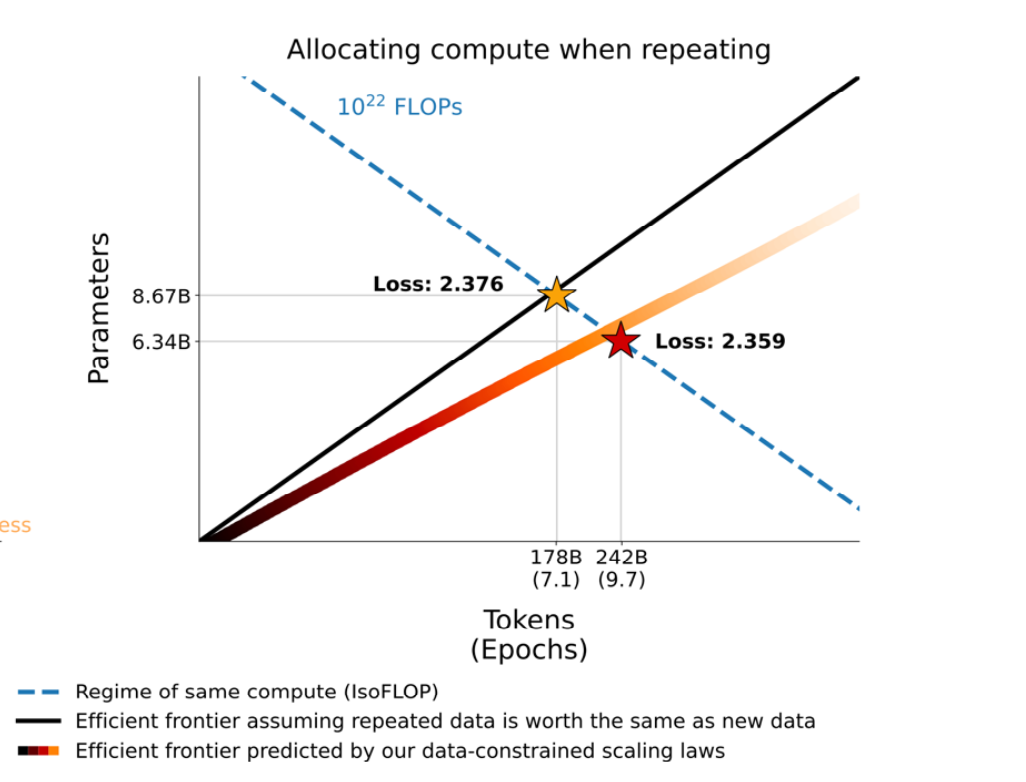
反直觉建议: 当数据不足(不得不大量重复)时,与其把模型训练更久,不如把模型做大一点。
7. 规模越大,筛选策略越不一样:动态数据池(Crossing curves)
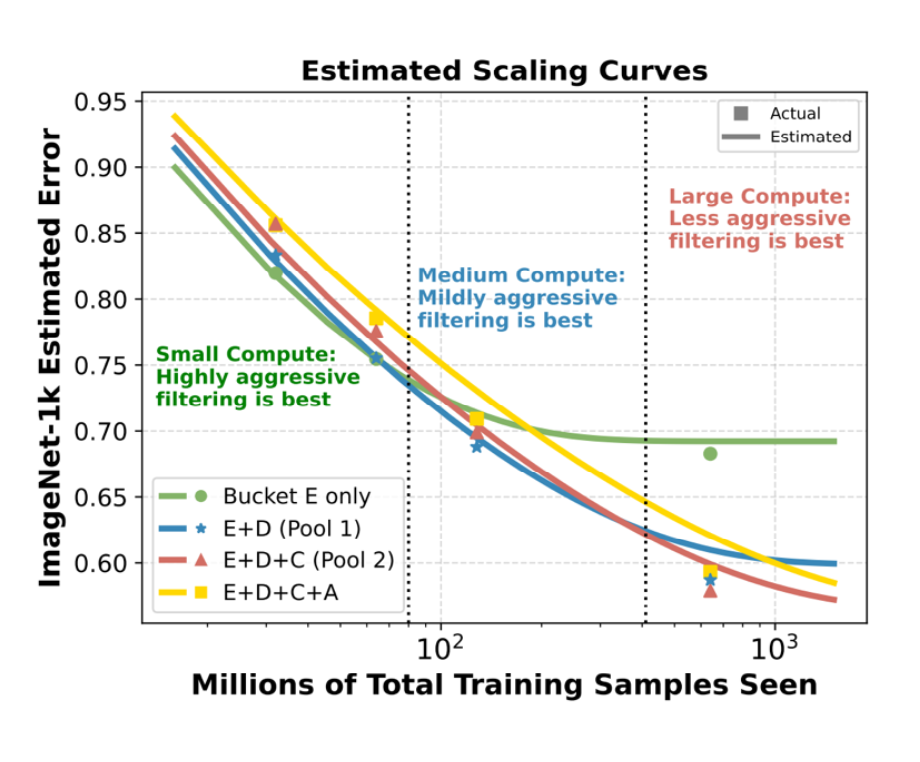
一个非常实用的结论:数据筛选标准应随规模变化。小模型算力有限,能吃完高质量数据;大模型算力巨大,高质量数据不够用,过度筛选会迫使你重复数据,反而更亏。
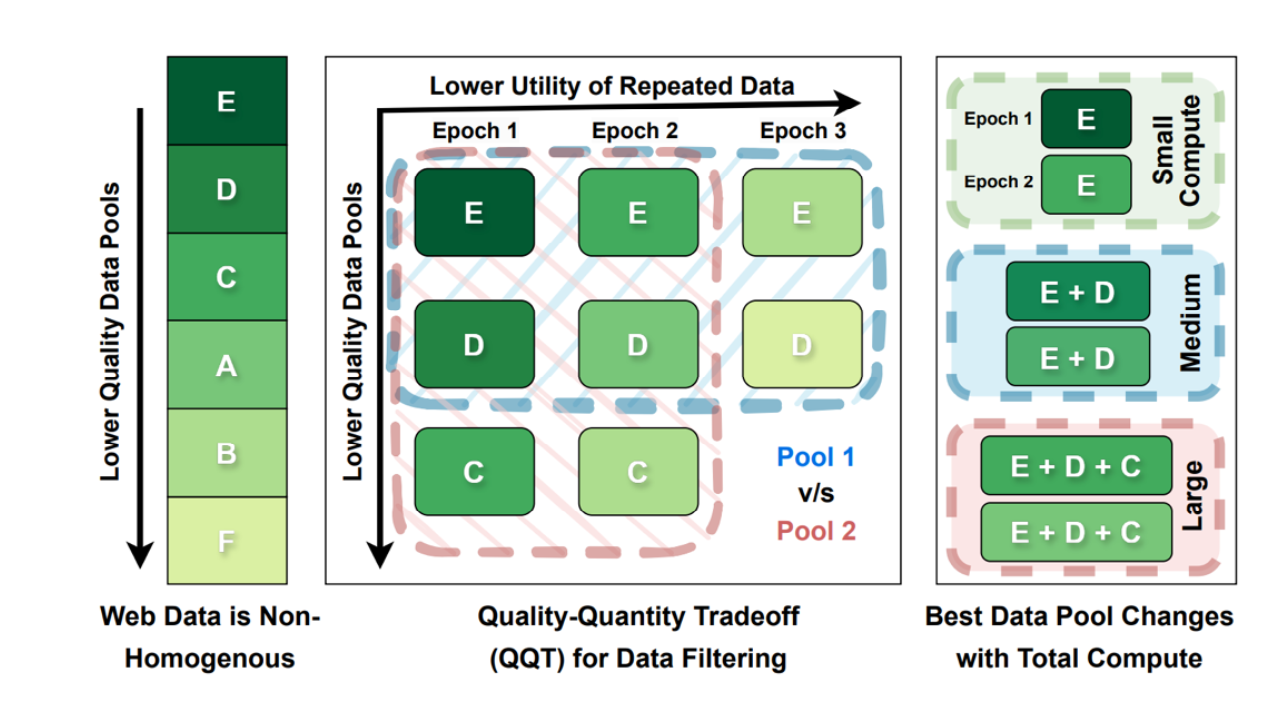
对应的“交叉曲线”现象:
8. Scaling laws 给模型工程师的“答题卡”
这一部分把 scaling 的结论落到常见工程选择题上:架构、优化器、深度/宽度与参数口径、以及形状超参到底值不值。
8.1 架构:Transformer vs LSTM(大规模下差异会拉开)

课堂结论:随着规模拉大,Transformer 往往能达到更低的 loss。
8.2 优化器:Adam vs SGD
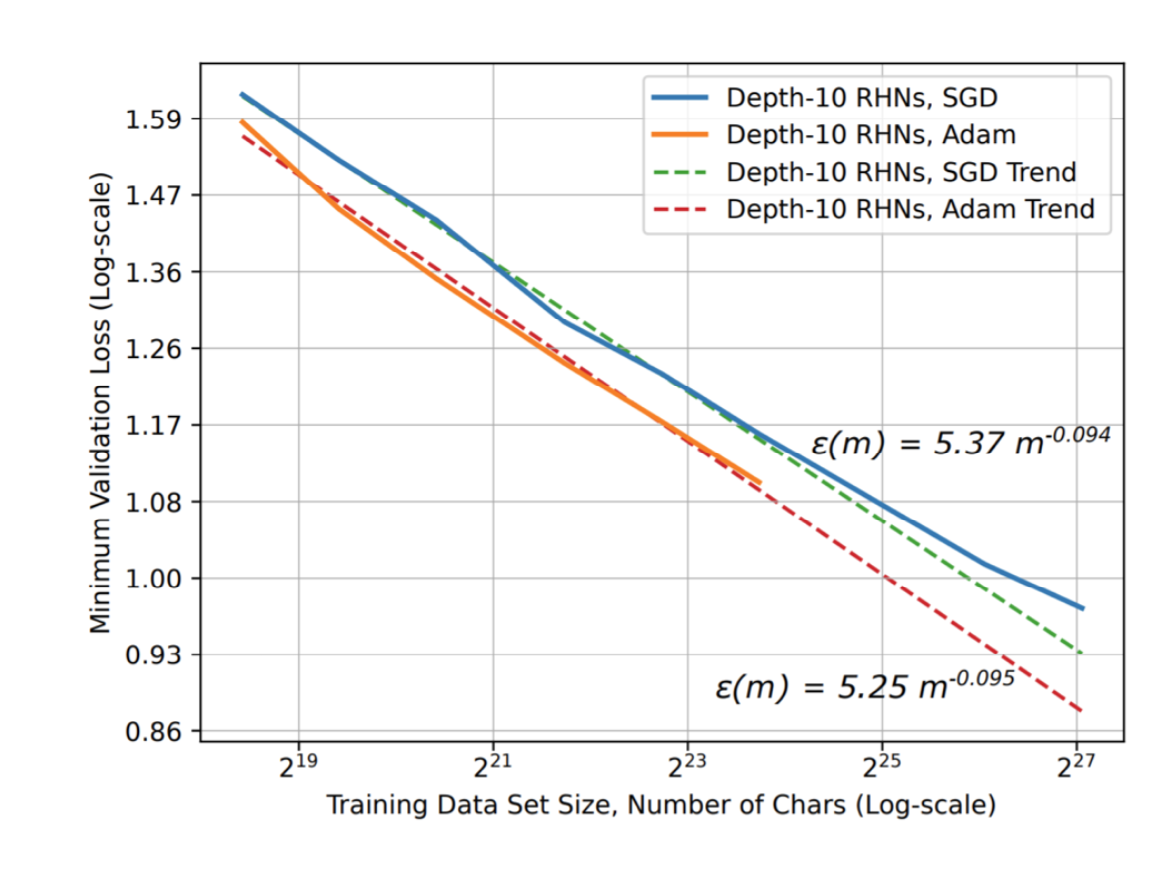
Hestness 2017 的实验里,Adam 往往在更广的数据范围内处于更低 loss 区间(趋势线也更优)。
8.3 深度 vs 宽度:深度需要“过阈值”,之后参数总量更关键
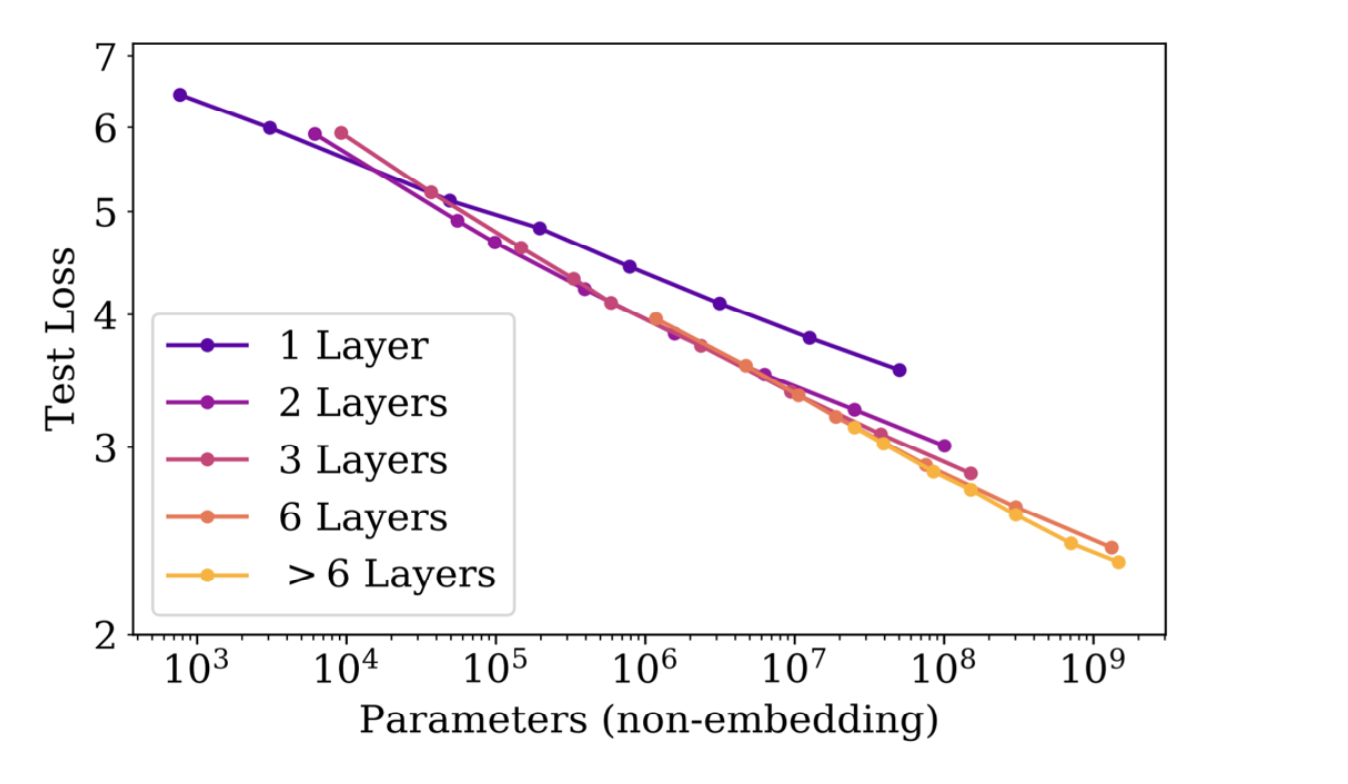
课堂要点:
- 从 1 层到 2 层可能是“质变”(非线性变换次数过少不够用)。
- 超过一定阈值后(课堂图中提到约 $10^7$ 参数尺度附近),继续加深往往边际收益递减。
8.4 关键口径:别把 embedding 参数当成“有效参数”
当用“总参数量(含 embedding)”画 scaling 时,会出现较大散乱;改用“非 embedding 参数量”后,曲线会更干净地重合:
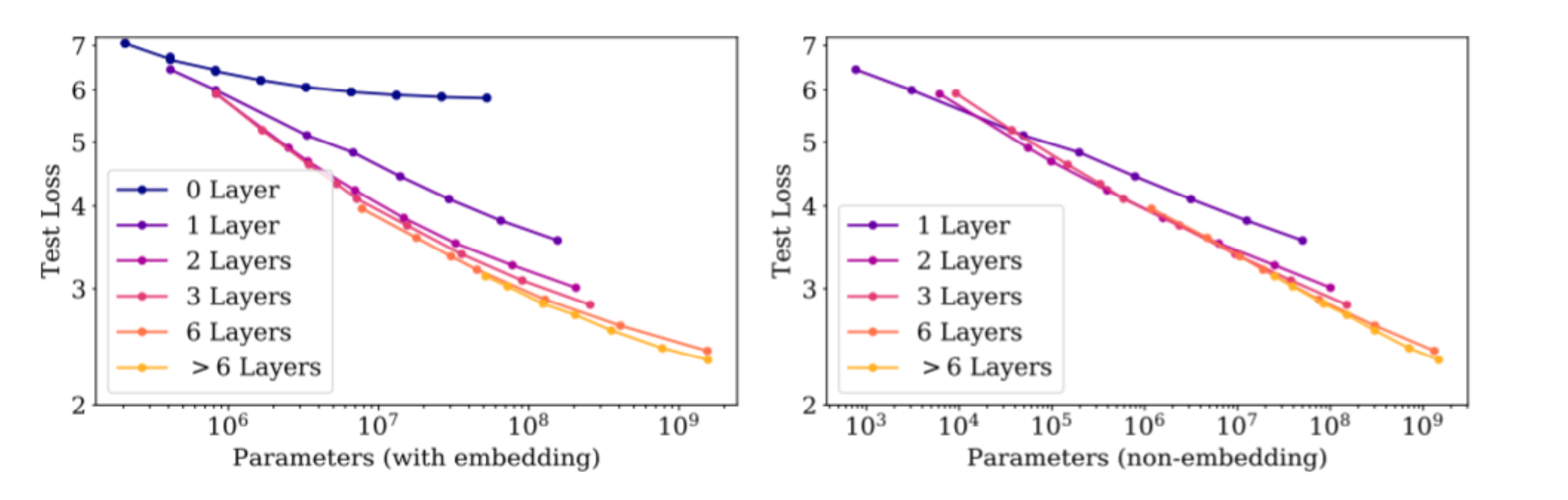
直觉:
- embedding 更像一个巨大的查表字典(lookup table),对“智能计算”贡献不如 Transformer block 的 attention/MLP。
- 因而 scaling law 更适用于 $N_{\text{non-embedding}}$(非嵌入参数)。
延伸:在 MoE(Mixture of Experts)里,“总参数量”也可能是虚的;更贴近缩放/计算成本的指标往往是每次前向激活的 active parameters(以及由此带来的实际 compute)。
8.5 形状超参:一个“平底碗”——Scale dominates shape
同样的参数量可以有不同形状(深而窄 / 浅而宽、FFN ratio、head dim)。Kaplan 2020 的结果是:曲面像一个底部很宽的碗,很多设置“差不多就行”。
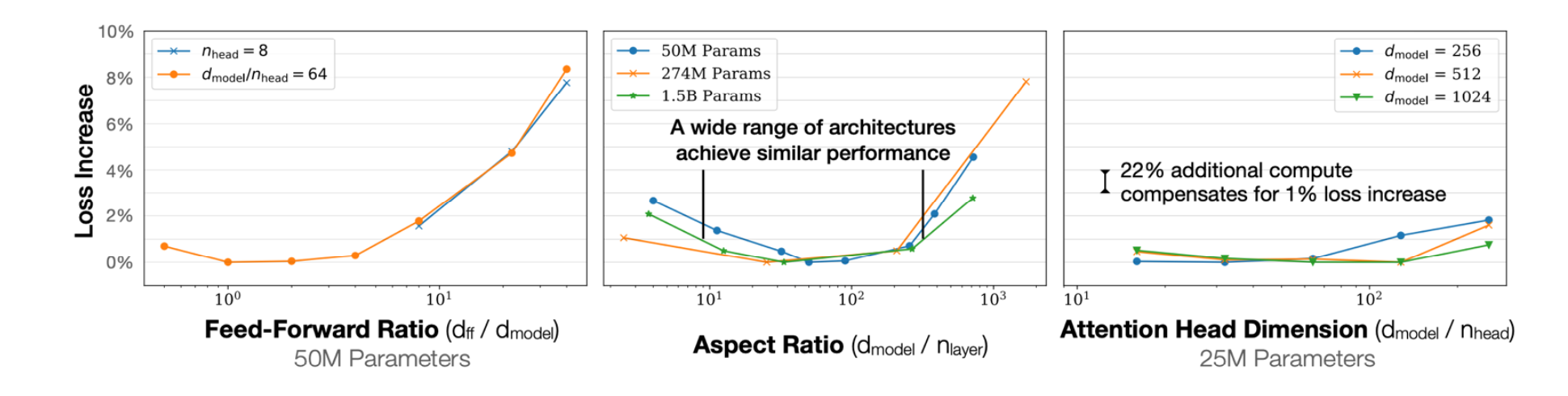
并且有一句很“工程”的注释:
“22% additional compute compensates for 1% loss increase.”
(形状搞砸一点,多花点算力通常就能补回来。)
9. Batch size:存在临界点,训练后期需要更大 batch
9.1 为什么 batch 不是越大越好?
直觉图:小 batch 噪声大但每步便宜;大 batch 方向更准但每步昂贵。
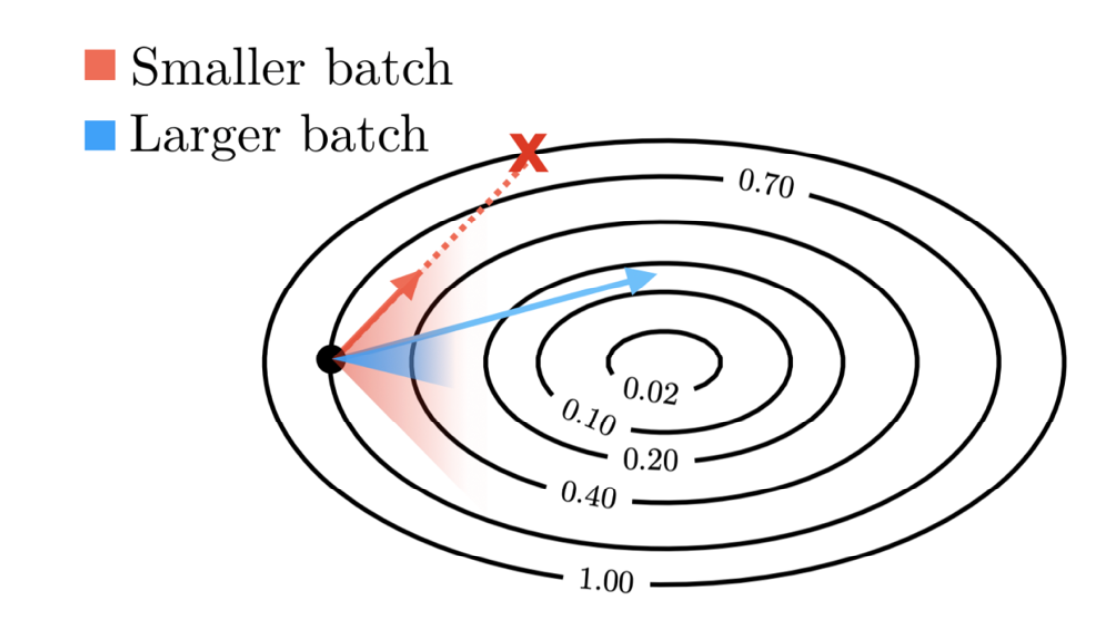
关键是“临界 batch size”:超过它,再加 batch 收益很小(并行效率开始失效)。
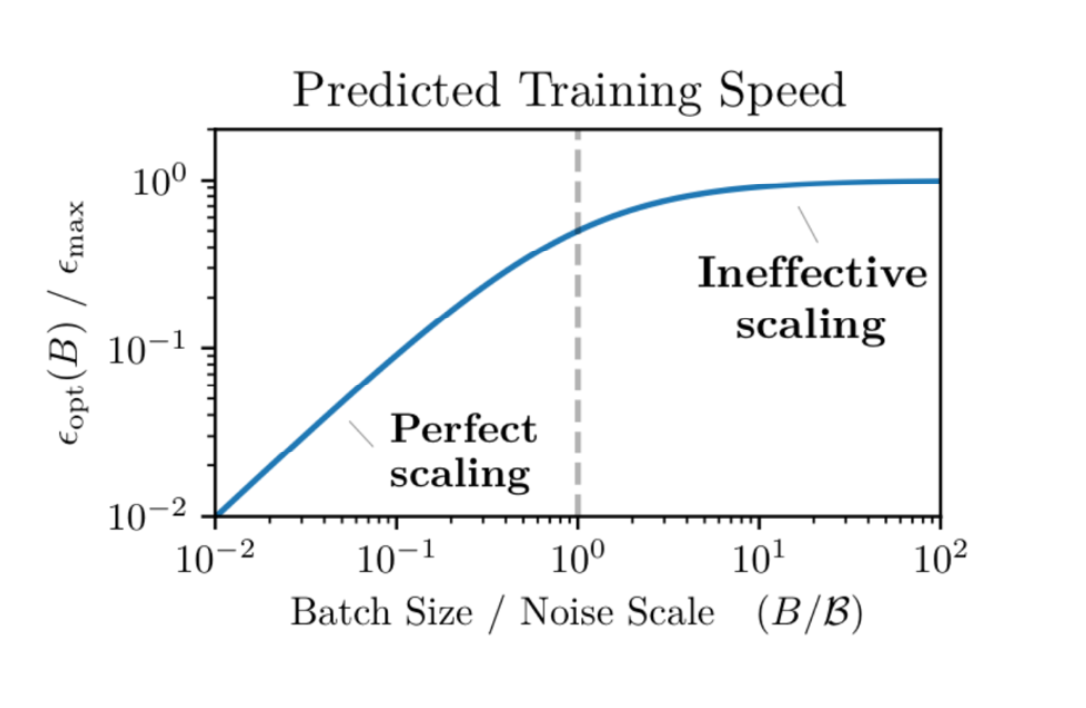
概念性定义(课堂给出的写法): \(\text{Critical Batch} \approx \frac{\text{达到目标 loss 所需的最小样本数}}{\text{达到目标 loss 所需的最小步数}}\)
9.2 Golden rule:目标 loss 越小,需要的 batch 越大
训练越到后期,loss 越小,噪声越难压,需要的 batch 会非常夸张地增大(图上指数约为 -4.8):
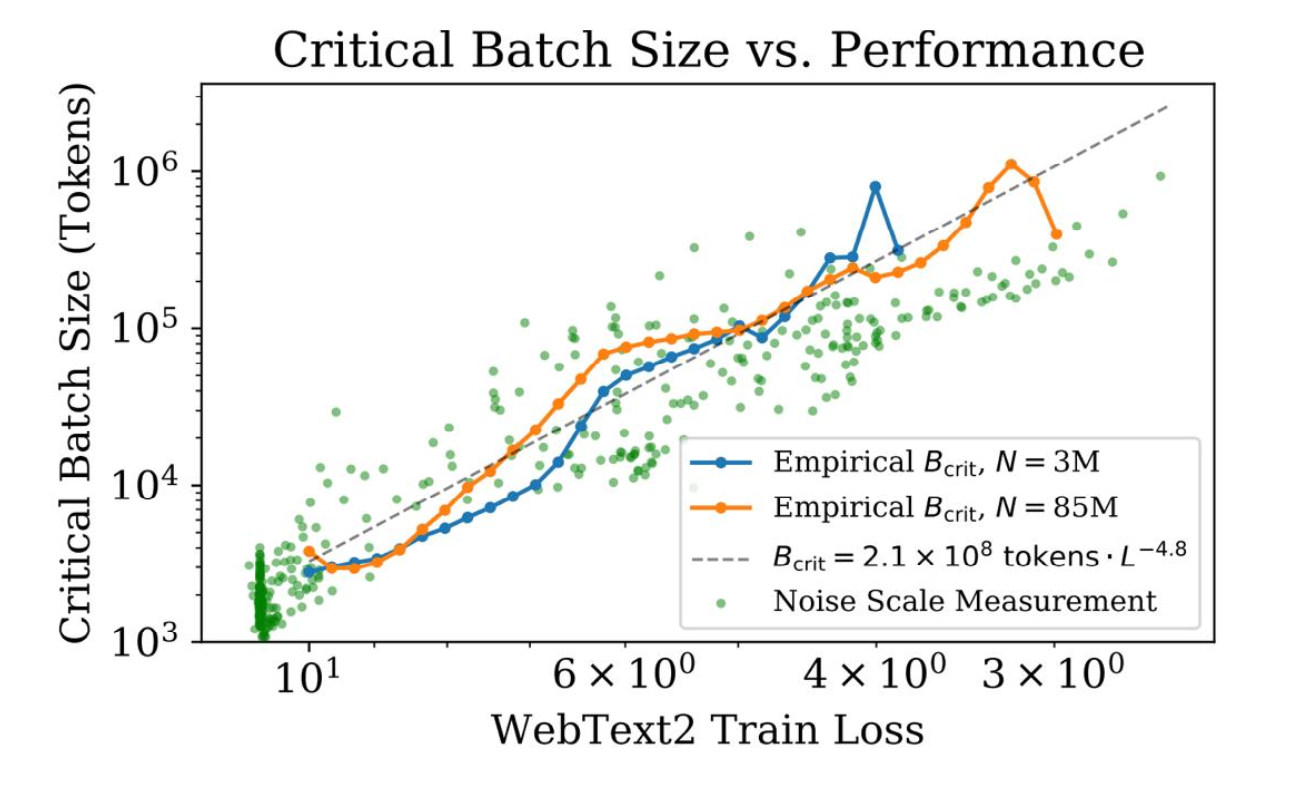
工程落地:
- 不要全程固定 batch。
- 做
batch size warmup / ramp-up:随训练进度逐步增大全局 batch。
10. 训练时间不会线性爆炸:步数近似恒定,靠更大 batch 吃掉更多算力
当模型与算力扩大很多倍时,如果保持 batch 不变,只能靠增加步数,训练会变得极长;但 scaling 的结论更支持另一条路:步数规模上近似恒定,主要通过更大的 batch 来消耗更多算力。
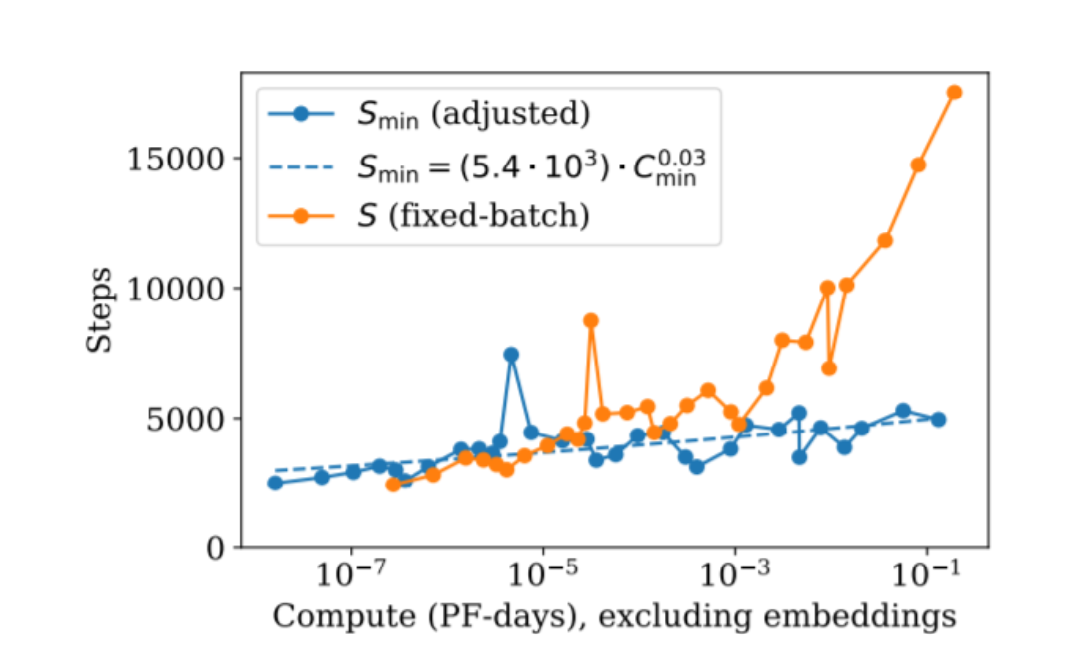
一个常见口径: \(S_{\min} \propto C_{\min}^{0.03}\)
指数很小,意味着算力上去很多倍,所需优化步数只会轻微变化。这也解释了为什么这对数据并行是“好消息”:增 batch 很容易通过堆卡实现。
11. 学习率:muP 让“小模型调参 → 大模型复用”更可行
11.1 痛点:标准做法下最佳学习率会随宽度漂移
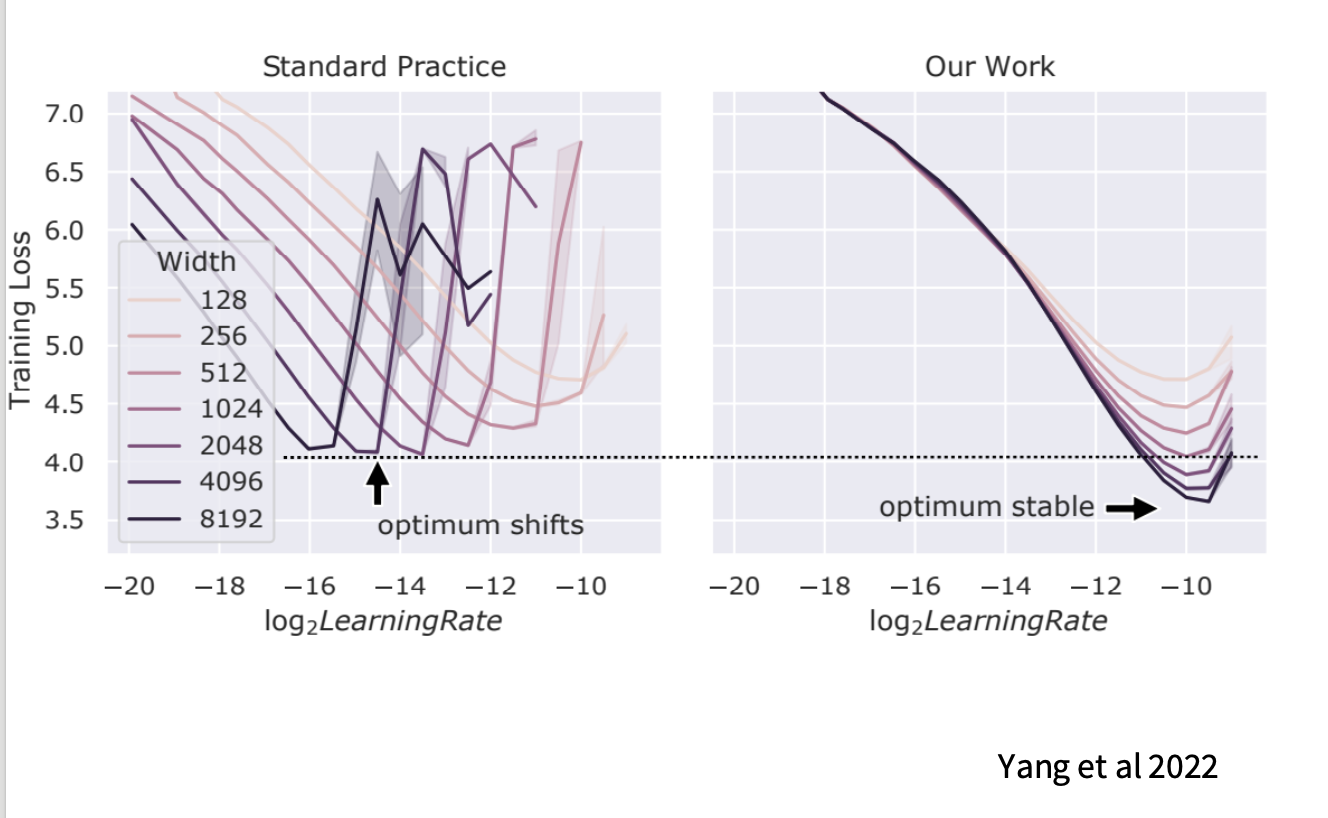
11.2 muP:把漂移“钉住”,实现零样本超参迁移
muP(Maximal Update Parametrization,Greg Yang 等)通过对初始化/学习率的宽度依赖做系统修正,使不同宽度模型的曲线更可比,最佳 LR 位置更稳定:
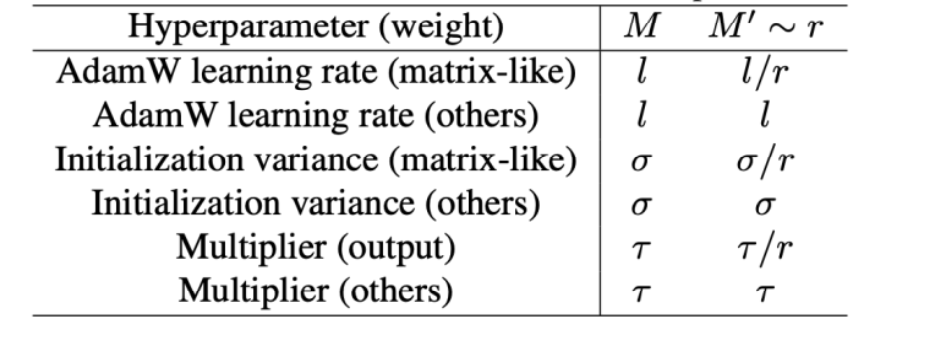
工程意义:能更放心地在小模型上找一套较优超参,再迁移到大模型,降低昂贵搜索成本。
12. 联合缩放:数据量与模型大小必须一起变(valley / Pareto)
只加数据不加模型会撞上“模型瓶颈”,只加模型不加数据会撞上“数据瓶颈”。因此需要联合公式来刻画 trade-off。
12.1 现象:小模型吃不下海量数据(数据被浪费)
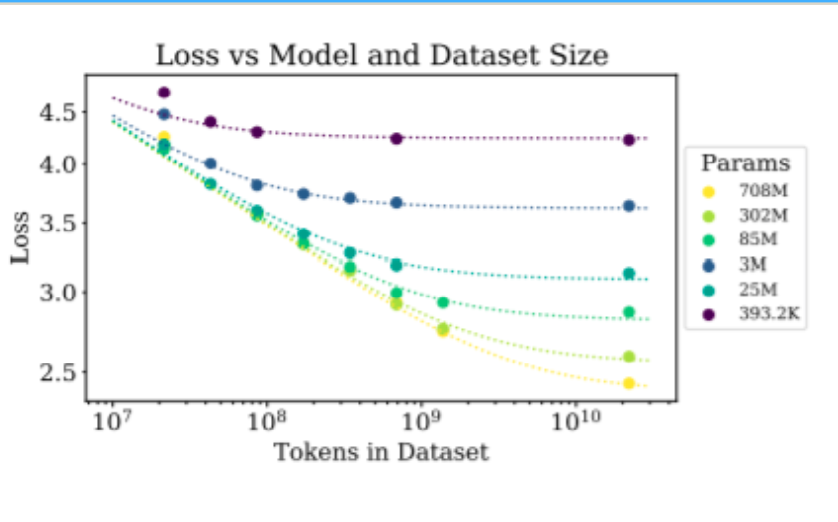
12.2 两类联合形式(课堂提到的两个代表)
为避免符号混乱:这一小节沿用论文/幻灯片常见写法,用 $n$ 表示数据量(对应前文 $D$),用 $m$ 表示模型大小(对应前文 $N$)。
Rosenfeld+ 2020(加法直觉): \(\text{Error} = n^{-\alpha} + m^{-\beta} + C\)
Kaplan+ 2020(另一种耦合写法,课堂简化口径): \(\text{Error} = \left[m^{-\alpha} + n^{-1}\right]^{\beta}\)
两者的共同点:必须同时增大 $n$(数据)与 $m$(模型)才能持续下降。
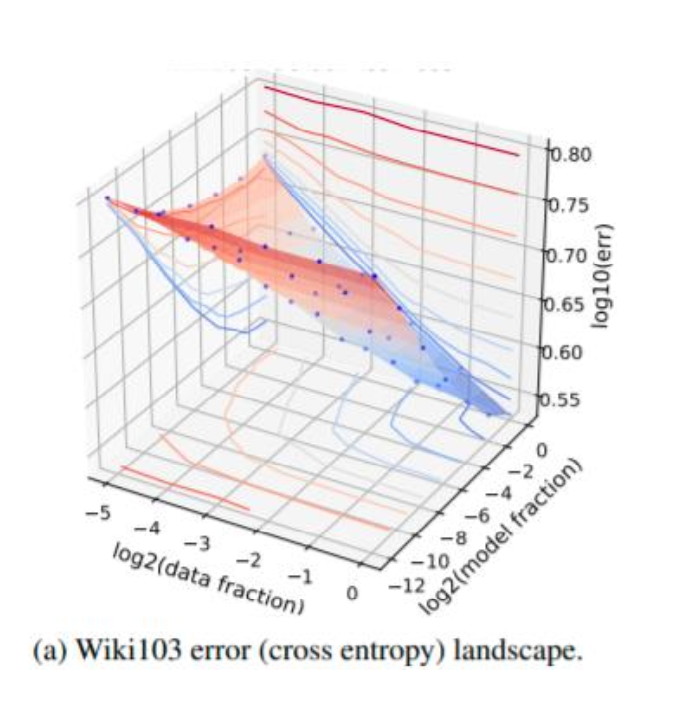
12.3 3D 视角:误差曲面像山谷,最优路径沿“对角线”
13. 外推真的可用:用小模型数据预测大模型,准得可怕
用很小的模型/数据去拟合 $\alpha,\beta,C$,再外推到大规模点,预测值与真实值往往高度一致:
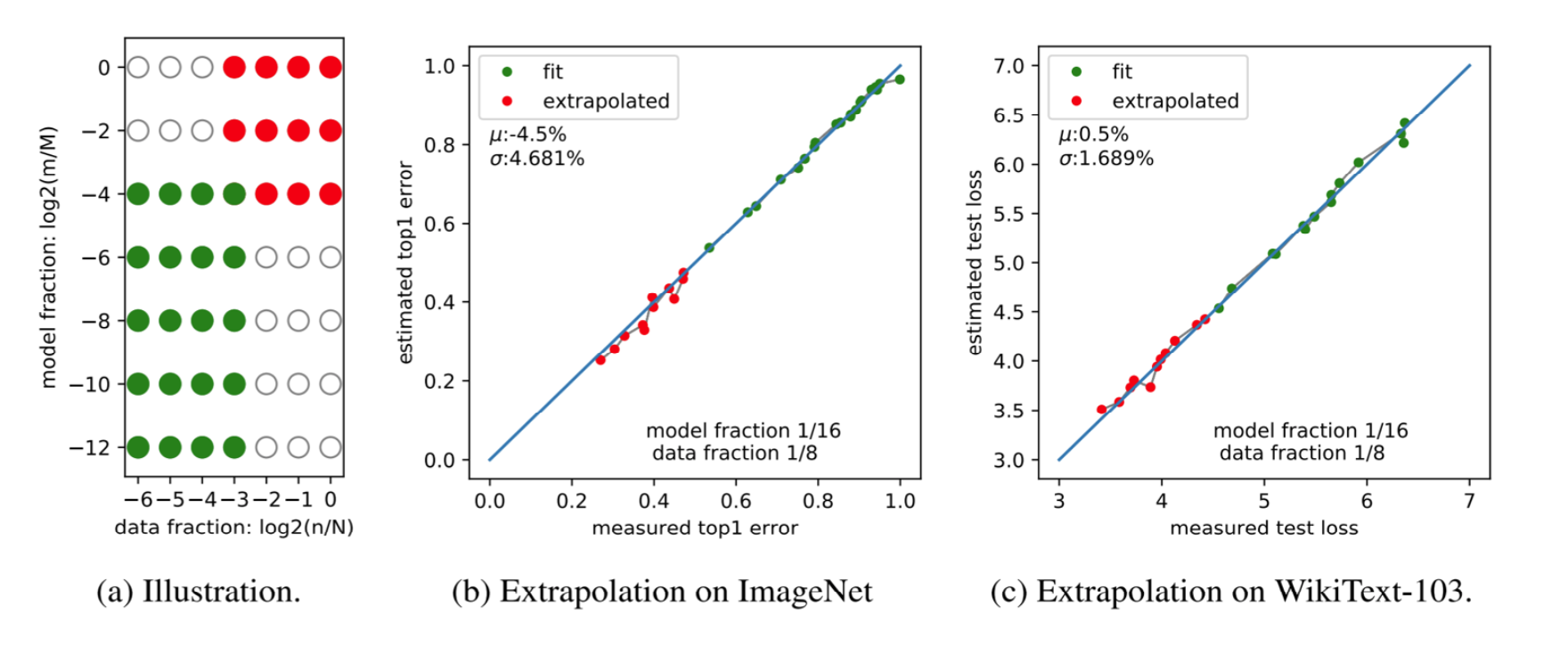
这也是 scaling laws 能从“经验”变成“工程方法”的关键:它不仅解释过去,还能指导未来预算决策。
14. 固定算力预算:Kaplan 的“香蕉曲线”与结论(后来被反转)
当算力预算固定时,一个常用近似是: \(C \approx 6 \times N \times D\)
于是 $C$ 固定意味着 $N$ 与 $D$ 是此消彼长的零和分配:做大模型就得少喂数据,喂更多数据就得模型更小。
14.1 香蕉曲线与包络线(Pareto frontier)
Kaplan 2020 当时的结论倾向于:
大模型(哪怕欠训练)通常优于小模型(哪怕训练得很充分)
这直接推动了当时“模型越大越好”的趋势(如 GPT-3 175B)。
15. Chinchilla 反转:更小模型 + 更多数据(参数与数据更接近 1:1)
Hoffman et al. 2022(Chinchilla)指出 Kaplan 的最优配比偏向“模型过大、数据过少”。在固定算力下,compute-optimal 的策略更接近:
- 模型参数与训练数据 按更接近同比例的方式增长(常被口语化为
N:D ≈ 1:1的“配比思维”)。 - 许多当时的大模型落在“过大”的区域,造成算力浪费。
课堂里常用几个“定位点”来帮助理解这种浪费:
- Megatron-Turing NLG 530B:参数巨大但数据相对不足,按 Chinchilla 视角属于明显 oversize。
- GPT-3 175B:也更偏向“模型大、读书少”的一侧。
- Chinchilla 70B:在相近总算力下,用更小模型训练更多 tokens(课堂提到可达到 Gopher 280B 的约 4 倍数据量),结果在多项指标上反超更大的模型。
16. 为什么 Kaplan 与 Chinchilla 会差这么多?根因是学习率调度与训练步数匹配
一个看似微小但足以改变结论的细节:cosine learning rate schedule 的周期长度必须与实际训练步数匹配。
如果用同一条 schedule 去覆盖不同训练长度,并在中途截断,就会导致某些点“没收敛到该收敛的位置”,从而扭曲拟合出来的 scaling 曲线。
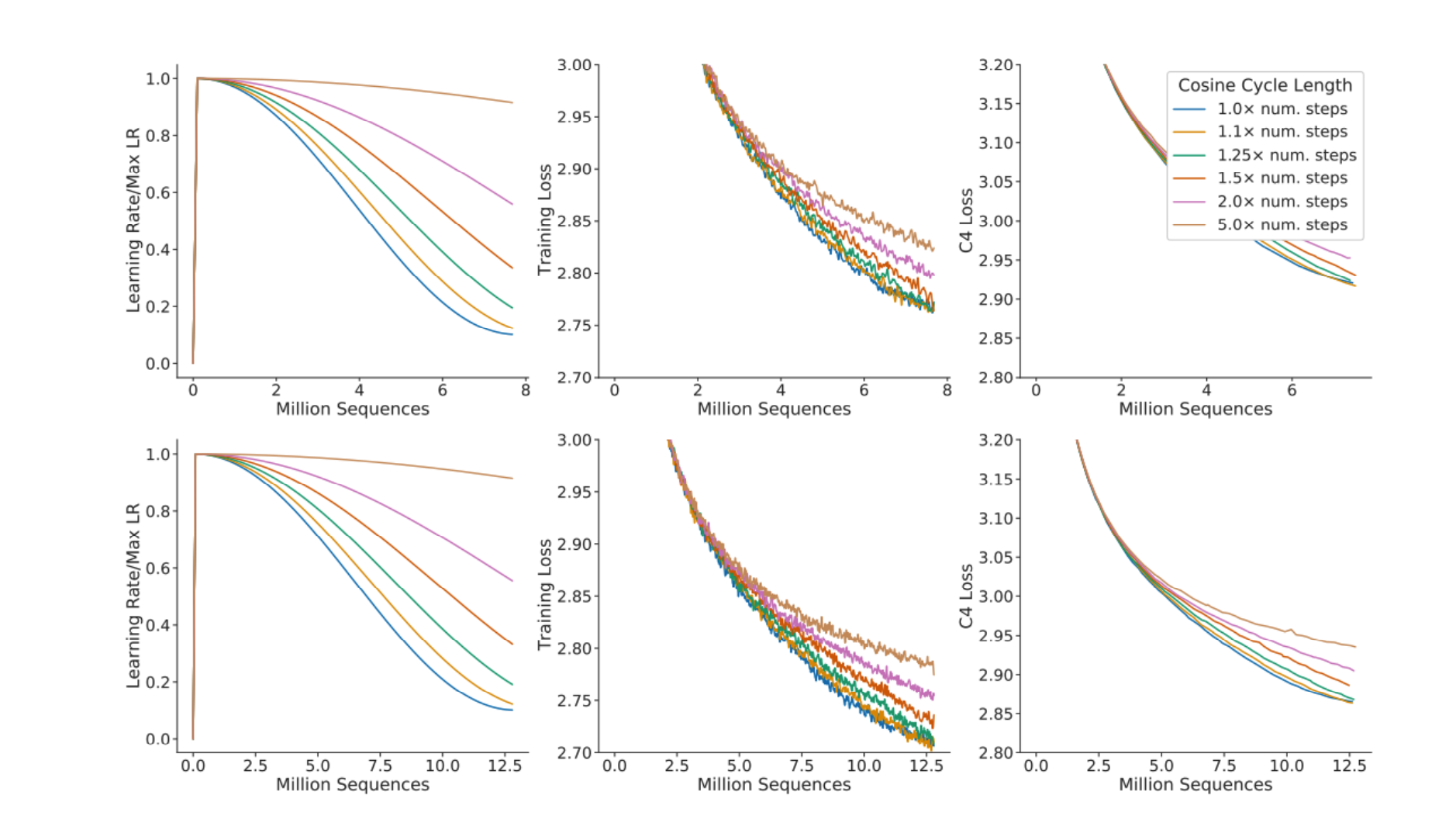
课堂总结口径:
- Kaplan 的偏差不是数学形式错了,而是实验设置里对 LR schedule 与训练时长的匹配不够严格。
- Chinchilla 修正后,得到了更“数据友好”的 compute-optimal 配比,从而推动了后续更重视“多读书(tokens)”的训练策略(也影响了 LLaMA 系列等)。