1 GPU 加速技术概览(GPU Acceleration Tech)
1.1 主要方向
- Tiling(分块)
- Memory Parallelism(内存并行)
- GPU 上的矩阵乘法加速
- 稀疏矩阵乘法(Sparse MatMul)
- cuBLAS 库使用
2 GPU 上的矩阵乘法基础示例
__global__ void MatMulKernel(float *a, float *b, float *c, int N) {
// Compute each thread's global row and col index -> output: (i, j)
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row >= N || col >= N) return;
float Pvalue = 0.0;
for (int k = 0; k < N; k++) {
Pvalue += a[row * N + k] * b[k * N + col];
}
c[row * N + col] = Pvalue;
}
2.1 每次迭代的操作
- 1次 FP32 乘法:
a[...] * b[...] - 1次 FP32 加法:
Pvalue += - 2次全局内存访问: 分别读取
a和b(每次 4 字节)
2.2 计算强度(Compute-to-Global-Memory-Access Ratio)
\[\text{计算强度} = \frac{2\ \text{FLOP}}{2 \times 4\ \text{Bytes}} = 0.25\ \text{FLOP/Byte}\]这表示:
- 每从内存读取 1字节数据,只执行 0.25次浮点运算
- 或者说:每执行 1次运算,需要传输 4字节数据
结论:
- 算法为内存密集型
- GPU 计算单元大部分时间在等待数据
- 优化方向:使用共享内存、分块(Tiling)等技术提升计算强度
其中cycle 是时钟周期
3 加载 vs 计算的性能对比
3.1 示例代码
C[i] = A[i] + B[i];
简单的向量加法操作
3.2 GPU 指令时间开销
(1) 内存加载指令 — 极慢
ld.global.f32 %f1, [%rd1]; // 加载 A[i] → 500 cycles
ld.global.f32 %f2, [%rd2]; // 加载 B[i] → 500 cycles
- 从全局内存读取数据
- 每次加载耗时约 500个时钟周期
- 总加载时间:1000 cycles
(2) 计算指令 — 极快
add.f32 %f3, %f1, %f2; // 执行加法 → 1 cycle
- 浮点加法运算
- 仅需 1个时钟周期
(3) 存储指令
st.global.f32 [%rd3], %f3;
3.3 时间对比
时间对比
| 操作类型 | 耗时 (cycles) | | —- | ———– | | 数据加载 | 1000 (500 + 500) | | 实际计算 | 1 |
比值:1000 : 1
3.4 关键洞察
“Loading data takes more time than actual computation!” 加载数据的时间远超实际计算时间!
3.5 实际意义
这个例子清晰展示了:
- 内存墙问题:GPU 性能瓶颈在于数据传输
- 计算单元浪费:多数时间 GPU 在等待数据
-
优化方向:
- 减少全局内存访问次数
- 使用共享内存/寄存器缓存数据
- 提高数据重用率
- 增加计算强度
这就是为什么优化GPU程序的核心是优化内存访问模式,而不仅仅是优化算法本身
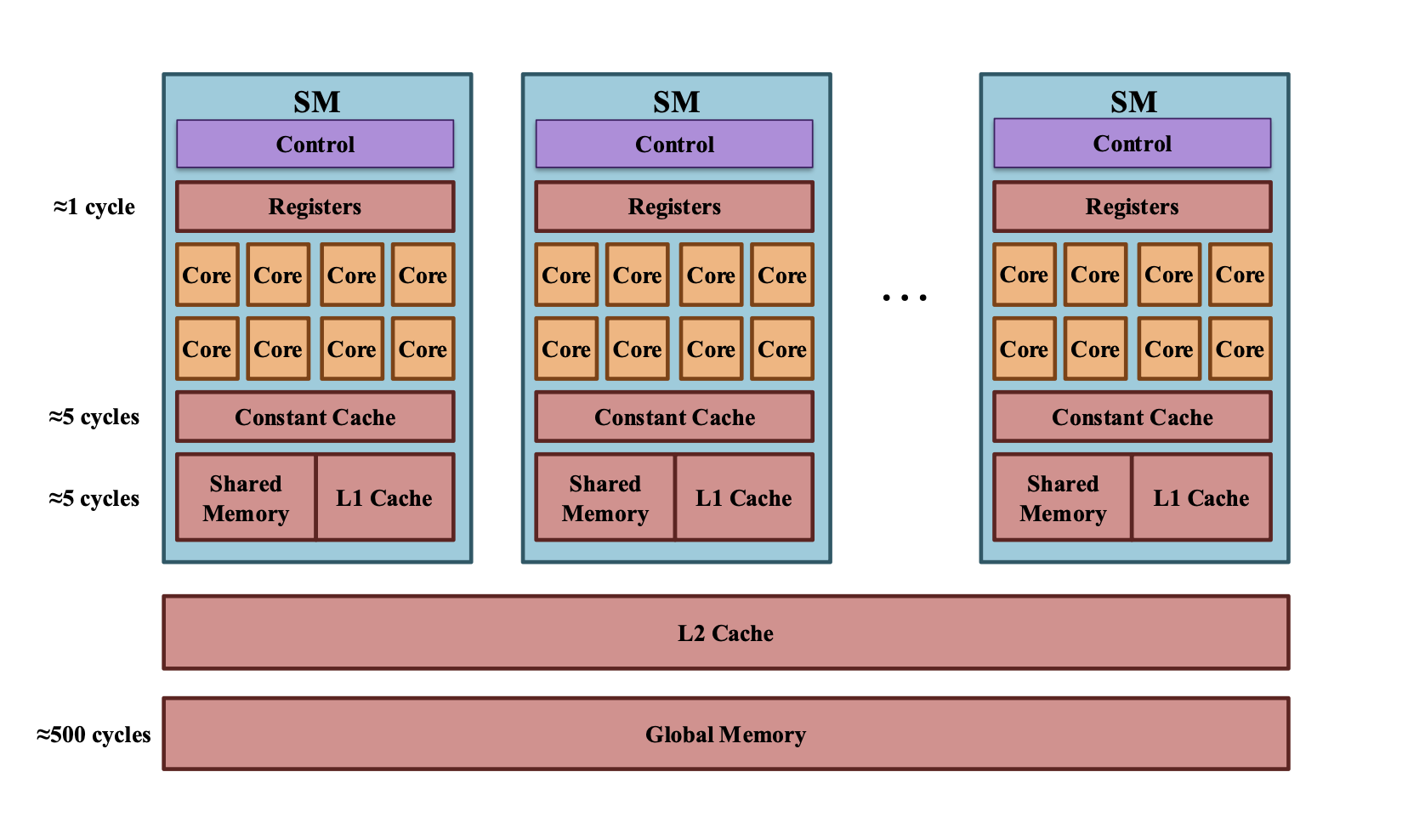
4 CUDA 设备内存模型
4.1 内存层次结构(从快到慢)
4.1.1 寄存器(Registers)- 最快
- 作用域: 每个线程私有
- 访问权限: 读/写(R/W per-thread)
- 特点:
- 速度最快(1 cycle)
- 数量有限
- 自动分配给线程的局部变量
4.1.2 局部内存(Local Memory)
- 作用域: 每个线程私有
- 访问权限: 读/写(R/W per-thread)
- 特点:
- 实际存储在全局内存中
- 用于寄存器溢出的数据
- 速度较慢
4.1.3 共享内存(Shared Memory)- 重要优化工具
- 作用域: 每个线程块内共享
- 访问权限: 读/写(R/W per-block)
- 特点:
- 速度快(比全局内存快约100倍)
- 同一块内的所有线程可访问
- 用于线程间数据共享和缓存
- 橙色区域显示在图中
4.1.4 全局内存(Global Memory)- 最慢但最大
- 作用域: 整个Grid可访问
- 访问权限: 读/写(R/W per-grid)
- 特点:
- 容量大(GB级)
- 速度慢(~500 cycles)
- 所有线程都可访问
- Host可以传输数据到此
4.1.5 常量内存(Constant Memory)
- 作用域: 整个Grid可访问
- 访问权限: 只读(Read only per-grid)
- 特点:
- 有缓存机制
- 适合广播相同数据给所有线程
- Host负责写入
| 类型 | 作用域 | 访问权限 | 特点 |
|---|---|---|---|
| 寄存器(Registers) | 每线程 | R/W | 最快(1 cycle),数量有限 |
| 局部内存(Local Memory) | 每线程 | R/W | 存储寄存器溢出数据,速度慢 |
| 共享内存(Shared Memory) | 每块 | R/W | 比全局内存快约100倍,块内共享 |
| 全局内存(Global Memory) | 全Grid | R/W | 容量大(GB级),速度慢(~500 cycles) |
| 常量内存(Constant Memory) | 全Grid | 只读 | 适合广播数据,有缓存 |
4.2 数据流向
Host ←→ Global Memory / Constant Memory
↕
Thread Registers
↕
Shared Memory (块内共享)
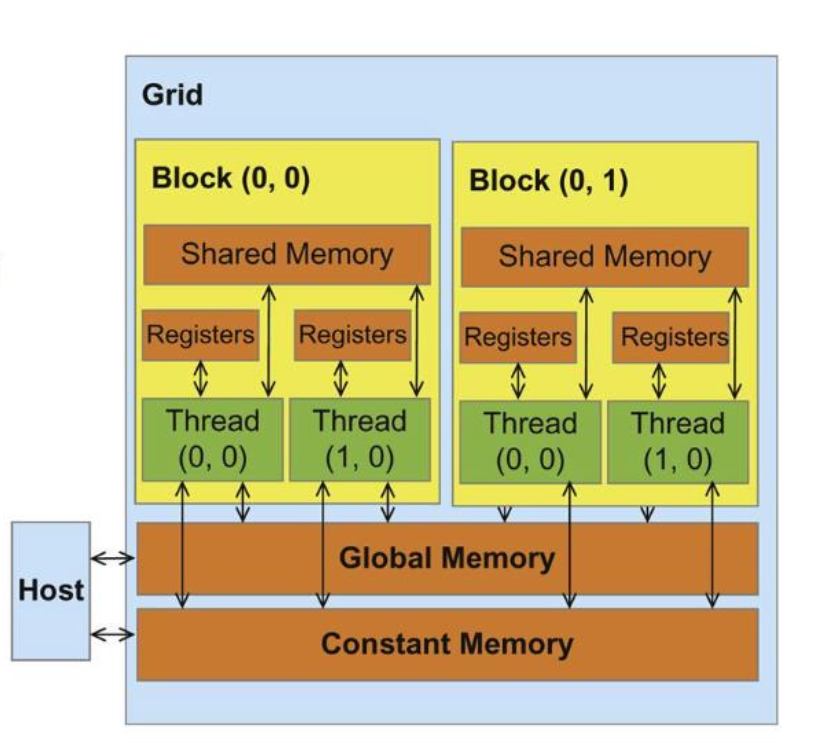
速度排序: \(Registers > Shared\ Memory >> Global\ Memory\)
4.3 CUDA设备内存访问
| Variable declaration | Memory | Scope | Lifetime |
|---|---|---|---|
int var; |
Register | Thread | Grid |
int varArr[N]; |
Local | Thread | Grid |
__device__ __shared__ int SharedVar; |
Shared | Block | Grid |
__device__ int GlobalVar; |
Global | Grid | Application |
__device__ __constant__ int constVar; |
Constant | Grid | Application |
- Register: 普通局部变量,自动分配到寄存器
- Local: 数组或寄存器溢出的变量,存储在局部内存
- Shared: 使用
__shared__修饰符,块内线程共享 - Global: 使用
__device__修饰符,全局可访问 - Constant: 使用
__device__ __constant__修饰符,只读全局内存
5 Tiled矩阵乘法优化详解
代码:https://github.com/llmsystem/llmsys_code_examples/blob/main/cuda_acceleration_demo/matmul_tile_full.cu
5.1 优化思想
使用 分块 (Tiling) 与 共享内存 (Shared Memory) 减少全局内存访问次数。
5.2 优化对比
5.2.1 原始版本的问题
for (int k = 0; k < N; k++) {
Pvalue += d_A[row * N + k] * d_B[k * N + col];
// 每次迭代访问2次全局内存(慢500 cycles)
}
- 计算一个元素需要访问全局内存 2N次
- 总访问次数:N² × 2N = 2N³
5.2.2 Tiled版本的优化
// 1. 将数据加载到共享内存(快速缓存)
As[threadIdx.y][threadIdx.x] = d_A[...]; // 只加载1次
Bs[threadIdx.y][threadIdx.x] = d_B[...]; // 只加载1次
// 2. 从共享内存读取(快100倍)
for(int k = 0; k < TILE_WIDTH; ++k) {
Cvalue += As[threadIdx.y][k] * Bs[k][threadIdx.x];
}
5.3 详细工作流程
5.3.1 数据分块加载
for(int ph = 0; ph < N/TILE_WIDTH; ++ph) { // 分成 N/TILE_WIDTH 个phase
- 将N×N矩阵分成多个 TILE_WIDTH × TILE_WIDTH 的小块
- 每个phase处理一对对应的tile
5.3.2 协作加载到共享内存
As[threadIdx.y][threadIdx.x] = d_A[row * N + ph * TILE_WIDTH + threadIdx.x];
Bs[threadIdx.y][threadIdx.x] = d_B[(ph * TILE_WIDTH + threadIdx.y) * N + col];
__syncthreads(); // 确保所有线程都加载完成
- 每个线程负责加载1个元素到共享内存
- 整个block协作加载 TILE_WIDTH² 个元素
__syncthreads()确保数据就绪后再计算
5.3.3 使用共享内存计算
for(int k = 0; k < TILE_WIDTH; ++k) {
Cvalue += As[threadIdx.y][k] * Bs[k][threadIdx.x];
}
__syncthreads(); // 确保计算完成再加载下一块
- 从共享内存读取(快)
- 重复使用已加载的数据
5.4 性能提升分析
5.4.1 内存访问次数对比
| 版本 | 全局内存访问 | 共享内存访问 |
|---|---|---|
| 简单版本 | 2N次/元素 | 0 |
| Tiled版本 | 2N/TILE_WIDTH次/元素 | 2N次/元素 |
5.4.2 具体示例(N=1024, TILE_WIDTH=16)
简单版本:
- 每个元素访问全局内存:2 × 1024 = 2048次
Tiled版本:
- 全局内存访问:2 × 1024/16 = 128次
- 共享内存访问:2 × 1024 = 2048次(但快100倍)
加速比:2048/128 = 16倍 全局内存访问减少
5.4.3 计算强度提升
简单版本:
0.25 FLOP/Byte (每8字节做2次运算)
Tiled版本:
假设TILE_WIDTH=16:
- 每次加载 16×16×2 = 512个float = 2048 Bytes
- 执行 16×16×16×2 = 8192 次运算
- 计算强度 = 8192/2048 = 4 FLOP/Byte
提升了16倍
5.5 关键技术点
1. __shared__ 共享内存
__shared__ float As[TILE_WIDTH][TILE_WIDTH];
__shared__ float Bs[TILE_WIDTH][TILE_WIDTH];
- 片上内存,访问延迟低(~1-5 cycles vs 500 cycles)
- Block内所有线程共享
2. __syncthreads() 同步
__syncthreads(); // 屏障同步
- 确保block内所有线程执行到此处
- 第一次:确保数据加载完成
- 第二次:确保计算完成,避免数据竞争
3. 数据重用
- 每个tile的数据被TILE_WIDTH个线程重复使用
- As的每一行被使用TILE_WIDTH次
- Bs的每一列被使用TILE_WIDTH次
6 内存限制 (Memory Restriction)
6.1 寄存器限制
寄存器限制
假设GPU有:
- 总寄存器数: 16384个
- 线程数: 1024个
每个线程可用寄存器: \(\text{每线程可用寄存器数} = \frac{16384}{1024} = 16\)
影响: 如果kernel使用超过16个寄存器,实际能并发运行的线程数会减少,降低occupancy(占用率)
6.2 共享内存限制
每个 Block 最多 192KB 共享内存
这是硬件限制,无法超越
例如 TILE_WIDTH=32:
\(2 \times 32 \times 32 \times 4 = 8\text{KB} < 192\text{KB} \ \text{(可行)}\)
6.3关键启示
6.3.1 为什么要关心这些限制
- Tile size不能无限大
- 如果
As + Bs超过192 KB,kernel无法运行 - 需要在tile size和occupancy之间权衡
6.3.2 实际影响
假设想用 TILE_WIDTH = 64:
As: 64 × 64 × 4 = 16 KB
Bs: 64 × 64 × 4 = 16 KB
总计: 32 KB ✅ 仍然OK
假设想用 TILE_WIDTH = 256:
As: 256 × 256 × 4 = 256 KB ❌ 超过192 KB限制!
- 常用TILE_WIDTH: 16, 32, 64
- 32是一个常见的平衡选择
- 太小:性能提升有限
- 太大:可能超出共享内存限制或降低occupancy
本文为上篇,聚焦 CUDA 内存模型与 Tiled 矩阵乘法。内存访问局部性、稀疏矩阵乘法与 cuBLAS 见下篇:GPU 内存访问优化与稀疏矩阵