Low precision numbers in computer
1.1 LLM 的推理与训练成本
以典型大模型为例:
-
Llama-70B
- 训练成本:39.3M H100-80GB GPU hours
- 推理显存需求:≈140GB GPU memory
-
DeepSeek V3(671B 参数)
- 训练成本:2.8M H800 GPU hours
- 推理显存需求:>400GB GPU memory
大模型的训练与推理都极度依赖 GPU 计算与显存带宽,促使低精度计算成为主流优化方向。
1.2 模型量化(Model Quantization)
使用低 bit 精度(如 INT8、FP16、BF16)表示模型参数与中间层输出:
-
优点:
- 显著减少显存占用 → 可使用更大 batch size;
- 提升计算效率,一次 cycle 计算更多数据;
-
缺点:
- 精度下降,累积量化误差可能影响模型性能。
1.3 数值精度格式(Precision Formats)

- INT8: 范围 $[-128,127]$,整数精度;
- BF16 / FP16: 浮点半精度,常用于混合精度训练。
参考:BFloat16 文档
2 BF16/FP16 加速原理与 CUDA 支持
2.1 HFMA2 半精度融合乘加指令
HFMA2 (Half-precision Fused Multiply-Add) 在 1 个 cycle 内完成 2 个融合乘加运算,实现约 2 倍吞吐加速
2.1.1 执行过程
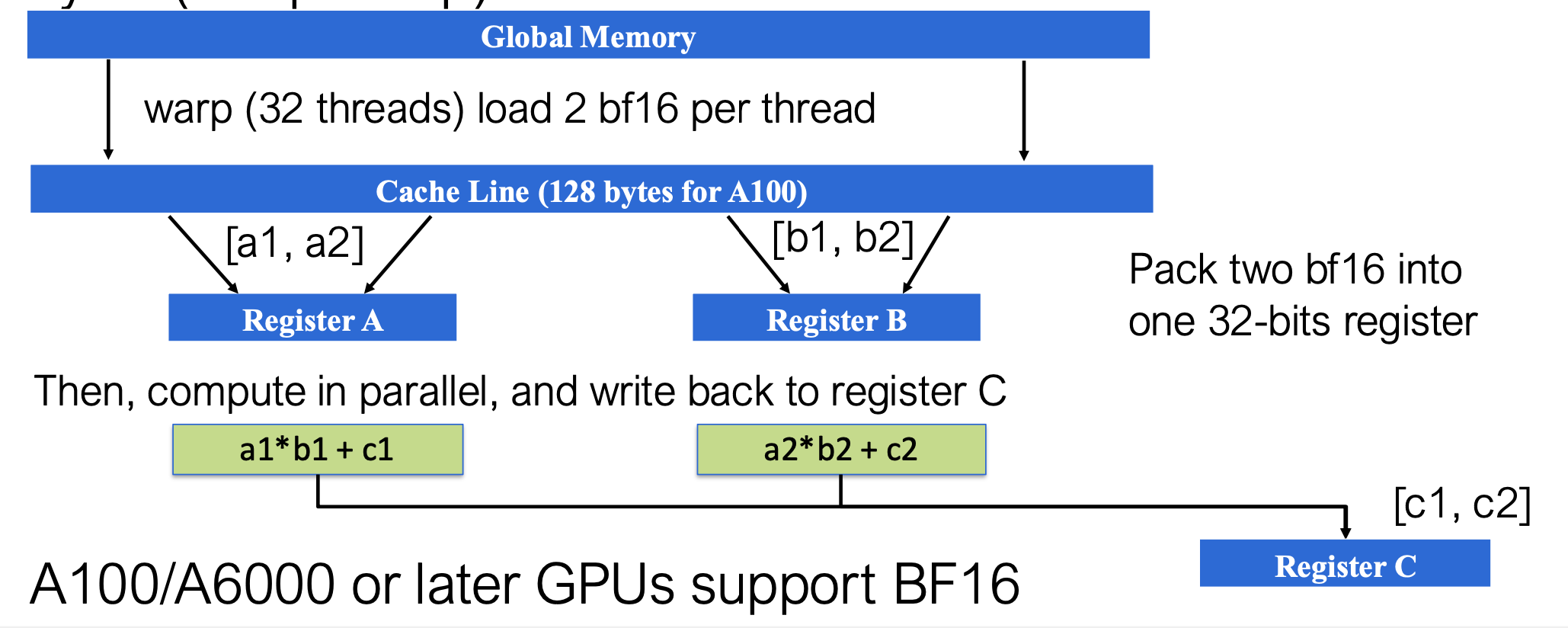
- 数据加载:从全局内存加载 BF16 数据(Warp=32 线程,每线程加载2个bf16数值)
- 数据打包:将两个 BF16 值打包到 32 位寄存器中
- Register A → [a₁, a₂]
- Register B → [b₁, b₂]
- 并行计算: \(\begin{cases} c_1 = a_1 \times b_1 + c_1 \ c_2 = a_2 \times b_2 + c_2 \end{cases}\)
- 结果存储:输出 [c₁, c₂] 写入 Register C
2.2 半精度 CUDA API 示例
2.2.1 向量加法(__hadd2)
__device__ __half2 __hadd2(const __half2 a, const __half2 b)
- 逐元素加法;
- 使用 RNE(Round-to-Nearest-Even) 舍入模式保证数值稳定性。
2.2.2 向量融合乘加(__hfma2)
__device__ __half2 __hfma2(const __half2 a, const __half2 b, const __half2 c)
执行 $a * b + c$ 的融合运算,同样使用 RNE 模式。
- 一条指令完成乘加;
- 每 cycle 处理 2 个元素;
- 吞吐率提升 2 倍。
3 基础量化方法(Basic Quantization Methods)
3.1 直接量化策略(Direct Quantization)
将 FP32 参数直接压缩为低精度格式(INT8/INT4)并在低精度下计算。
-
潜在问题:
- 精度损失与量化噪声;
- 数值范围不匹配(Range Mismatch);
- 量化误差(Quantization Error)。
3.2 量化单个数值的方式
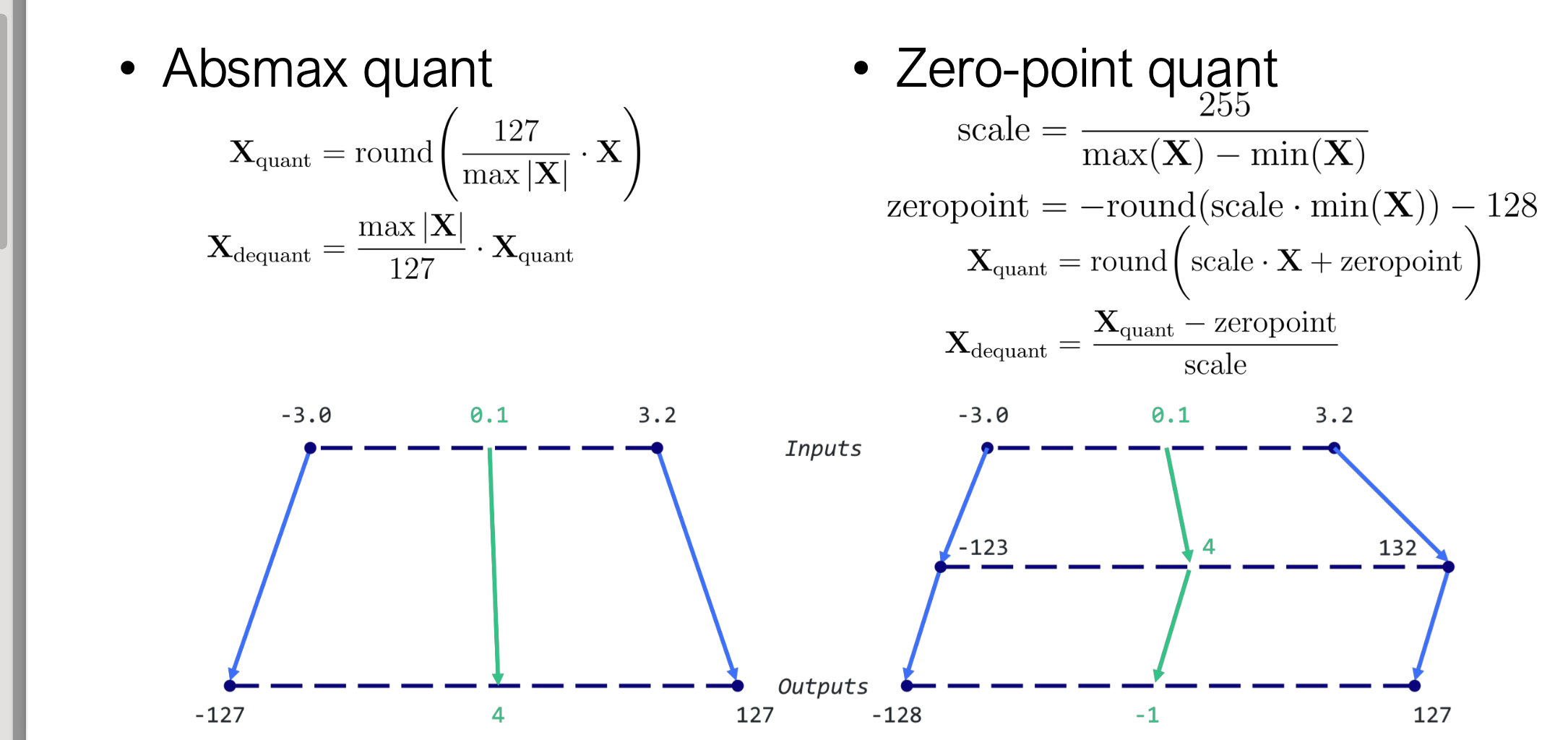
3.2.1 Absmax 量化(对称量化)
3.2.1 Absmax 量化(对称量化)
计算最大绝对值: \(\text{scale} = \frac{127}{\max|X|}\) 对称映射到 $[-127,127]$。
import torch
def absmax_quantize(X):
# Calculate scale
scale = 127 / torch.max(torch.abs(X))
# Quantize
X_quant = (scale * X).round()
# Dequantize
X_dequant = X_quant / scale
return X_quant.to(torch.int8), X_dequant
3.2.2 Zero-Point 量化(非对称量化)
计算实际范围:
计算范围与零点: \(\text{scale} = \frac{255}{\max(X)-\min(X)}, \quad \text{zeropoint} = (-\text{scale}\times\min(X)-128)\)
零点计算:确定原始0值映射到的INT8位置
非对称映射:
输入范围:[-3.0, 3.2] 输出范围:[-128, 127](256个值) 充分利用所有256个离散值
其实就是通过零点加了个偏移量
def zeropoint_quantize(X):
# Calculate value range (denominator)
x_range = torch.max(X) - torch.min(X)
x_range = 1 if x_range == 0 else x_range
# Calculate scale
scale = 255 / x_range
# Shift by zero-point
zeropoint = (-scale * torch.min(X) - 128).round()
# Scale and round the inputs
X_quant = torch.clip((X * scale + zeropoint).round(), -128,
127)
# Dequantize
X_dequant = (X_quant - zeropoint) / scale
return X_quant.to(torch.int8), X_dequant
4 逐层量化方法(Layer-wise Quantization)
4.1 AdaQuant
4.2 ZeroQuant

- 采用逐层蒸馏策略(Teacher 原模型 → Student 量化模型);
- 精度优于简单 PTQ;
- 已集成于 DeepSpeed
4.3 LLM.int8()
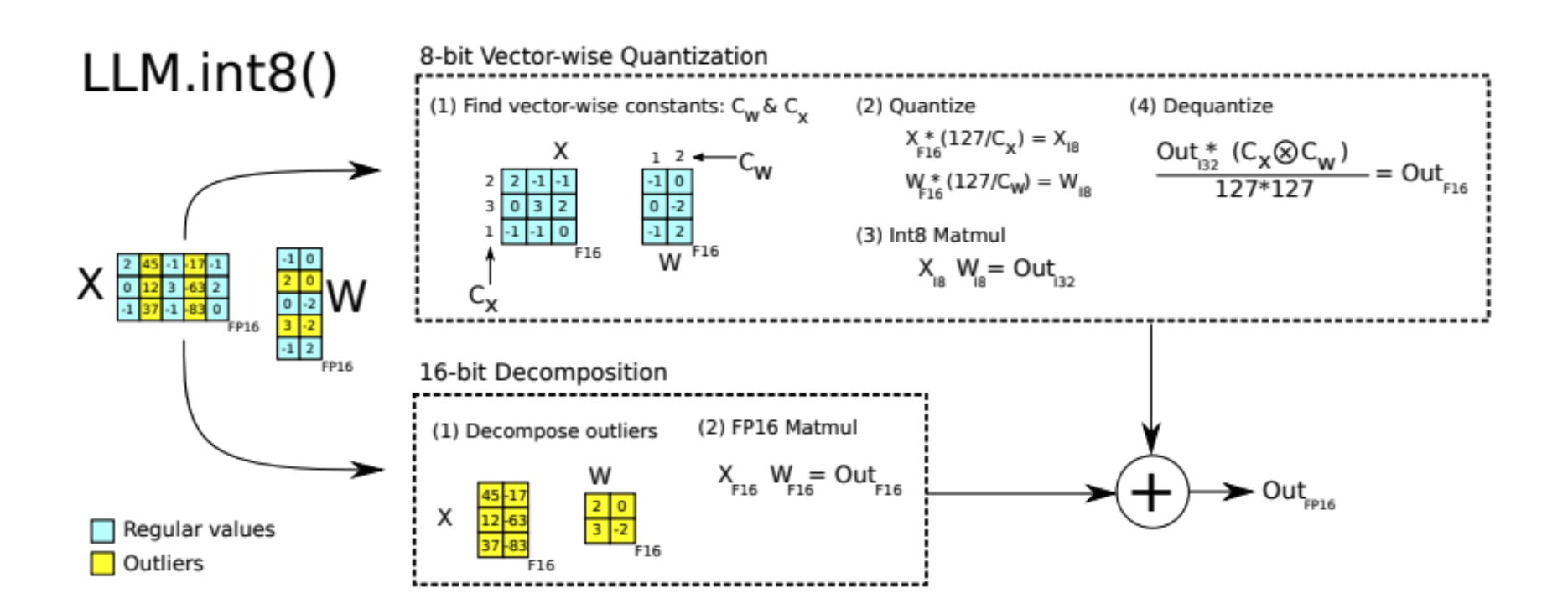
- 对矩阵乘法部分使用 INT8;
- 解决激活值异常值(outliers)问题;
- 采用混合精度:异常值保持 FP16,正常值使用 INT8
异常值判断标准:
- 幅度 ≥ 6.0;
- 层级覆盖 ≥ 25%;
- 序列维度覆盖 ≥ 6%。
参考:LLM.int8(): 8-bit Matrix Multiplication for Transformers at Scale, NeurIPS 2022.
5 GPTQ 量化(Gradient-based Post-Training Quantization)
5.1 基本思想
Gradient-based Post-Training Quantization)是一种后训练量化(PTQ)
通过最小化量化误差,使量化后的权重输出尽可能接近原模型输出:
\[\min_{\hat{W}} | W X - \hat{W} X |_2^2\]其中:
- $ X $:输入数据到当前层(维度 $ d \times \text{Len} $)
- $ W $:原始投影矩阵(projection matrix)
- $ \hat{W} $:量化后的权重矩阵
即:找到一个量化后的矩阵 $ \hat{W} $,使得在输入数据 $ X $ 上,前向输出与原始 $ W $ 的结果尽可能接近。
5.2 核心思路
-
按列块量化(Column-wise Quantization)
- GPTQ 不是一次性量化整个权重矩阵,而是每次量化一个列块(column-block)。
- 这样可以逐步控制误差累积,使得每一步的量化决策更精细
-
误差补偿机制(Error Compensation)
- 当一个列块被量化后,GPTQ 会更新所有尚未量化的权重列。
- 更新的目的在于:compensate for the error incurred by quantizing a single weight
- 即:通过调整未量化的部分,补偿当前量化带来的误差,使整体的输出误差最小化
参考:GPTQ: Accurate Post-Training Quantization for Generative Pre-trained Transformers. Frantar et al. ICLR 2023.
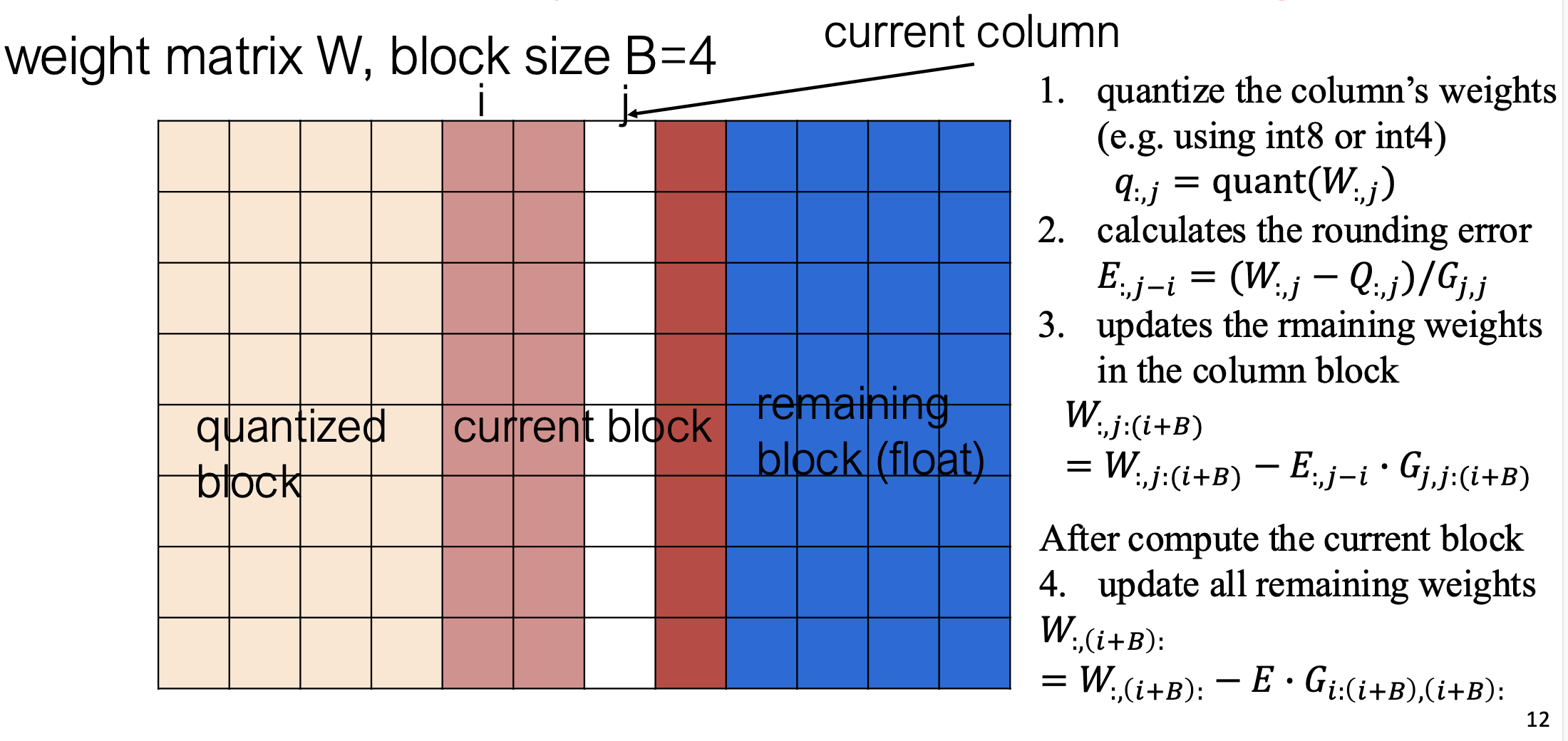
5.3 算法步骤
- Hessian 逆矩阵 Cholesky 分解
- 对当前线性层(Linear Layer)的输入数据 $X$ ,计算其 Hessian 矩阵的逆矩阵并进行 Cholesky 分解,以便后续快速计算加权误差的更新
- 这一操作相当于建立输入的二阶统计量基础,用于后续的误差传播与补偿
-
逐批(batch)处理权重矩阵 ( W ) 的列块(column block) 对每一批列块执行以下操作:
-
权重量化(Quantization)
- 使用某种“舍入(rounding)”方法(例如逐元素最邻近量化或最优舍入策略)将浮点权重转换为低比特整数。
-
计算舍入误差(Rounding Error)
- 计算量化前后的权重差值,以评估量化造成的误差大小。
-
更新当前列块内的权重(Update Weights in Block)
- 根据计算得到的舍入误差,对当前列块权重进行调整,使得在量化约束下误差最小化。
-
更新未量化列的权重(Propagate Error to Remaining Weights)
- 在当前列块处理完后,利用该块的误差信息,更新所有尚未量化的列块,从而在整个矩阵层面实现误差补偿。
-
伪代码:

6 GPTQ 与二阶优化理论(OBS / OBQ)
-
单权重量化可通过最优脑外科方法(Optimal Brain Surgeon, OBS)求解
- 当我们量化权重矩阵 ( W ) 中的一个权重时,这个问题可以被看作是一个 OBS(Optimal Brain Surgeon) 问题。
- OBS 理论表明,在已知 Hessian 矩阵的情况下,可以通过解析方式找到使误差最小化的单参数更新。
- 因此,在 GPTQ 中,我们可以一次更新一列(column)权重,使得量化误差最小。
-
高效更新逆 Hessian:利用秩-1 更新(rank-1 update)
- 在逐列量化的过程中,GPTQ 需要不断更新 Hessian 的逆矩阵。
- 这一过程可以通过 Optimal Brain Quantization (OBQ) 方法实现,即通过 rank-1 更新公式 来快速近似新的逆矩阵,而无需重新求逆。
- 实际实现中,GPTQ 使用 Cholesky 分解(Cholesky Decomposition) 预先计算出 Hessian 的分解形式,以进一步加速更新过程。
-
基于舍入误差的延迟批量更新(Batch and Lazy Update)
- 在每次计算舍入误差(rounding error)后,GPTQ 不会立即更新全部权重。
- 它采用一种“延迟(lazy)”的方式:批量计算并更新多个列块的误差补偿,从而在保持精度的同时提升效率。
6.1 Optimal Brain Surgeon (OBS)
基于二阶泰勒展开的最优单权重调整法:
\[\omega_p = \arg\min_{\omega_p} \frac{\omega_p^2}{[H^{-1}]_{pp}}\]补偿更新: \(\delta_p = -\frac{\omega_p}{[H^{-1}]*{pp}} H^{-1}*{:,p}\)
复杂度高达 $O(d^4)$,GPTQ 通过近似优化解决。
6.2 Optimal Brain Quantization (OBQ)

| 对比项 | OBS(剪枝) | OBQ(量化) |
|---|---|---|
| 目标 | 移除权重 | 低比特量化 |
| 优化变量 | $\omega_p$ | $w_q$ |
| 更新方式 | $\delta_p=-\frac{\omega_p}{[H^{-1}]{pp}}H^{-1}$ | $\delta_F=-\frac{w_q - quant(w_q)}{[H_F^{-1}]{pp}}(H_F^{-1})$ |
| 结果 | 稀疏化 | 低比特化 |
6.3 列块更新策略(Column-wise Update)
- 所有行共享同一逆 Hessian;
- 更新次数降为列数;
- 计算复杂度: \(O(d_{row}\cdot d_{col}^3) ;\Rightarrow; O(\max(d_{row}\cdot d_{col}^2,, d_{col}^3))\)
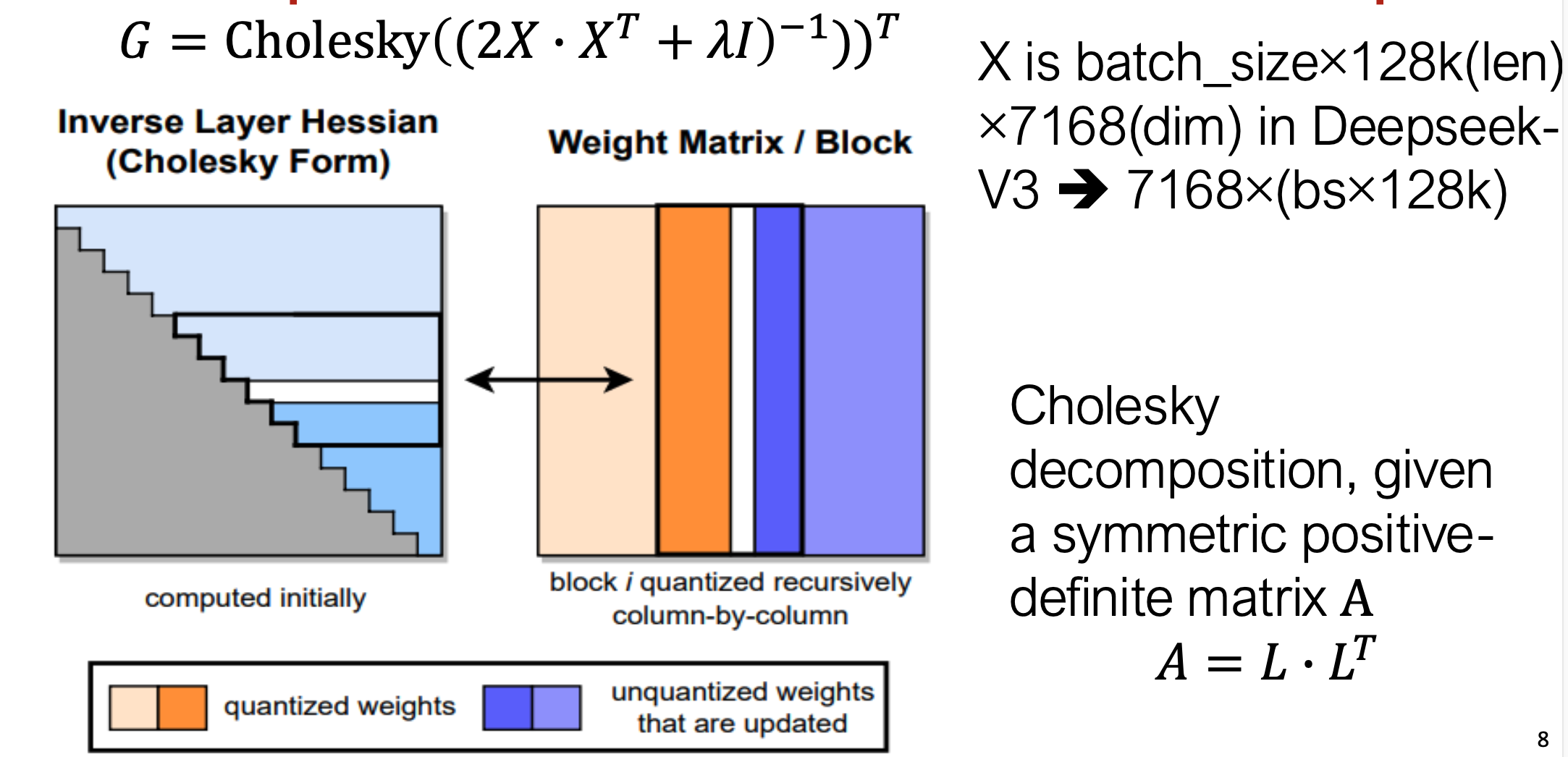
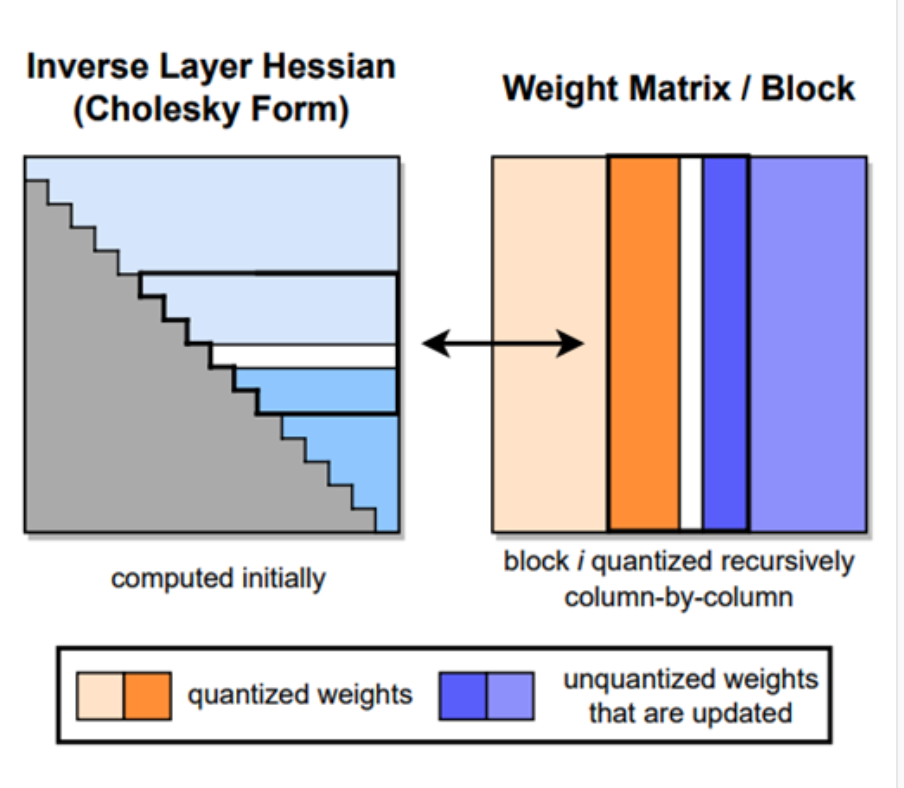
(a) 左图 — Inverse Layer Hessian (Cholesky Form)
- 表示层的逆 Hessian 矩阵经过 Cholesky 分解 存储;
- 每次量化一个列块(block)时,只需在分解矩阵中更新对应的下三角部分;
- 灰色区域:初始计算完成的部分;
- 蓝色区域:在逐列量化时动态更新的部分。
(b) 右图 — Weight Matrix / Block
- 表示当前正在量化的权重矩阵;
- 橙色块:已量化的列;
- 蓝色块:尚未量化、但被误差补偿更新的列;
- 每个 block 按列递归地被量化(从左到右)。
6.4 惰性批量更新(Lazy Batch Update)
6.4.1 问题背景:Naïve column update 太慢
逐列更新(naïve column update)的问题:
每量化完一列就立刻更新逆 Hessian 与权重矩阵;
这种操作需要频繁访问显存(memory access),而每次计算量较小;
因此会造成:
-
低计算/访存比(low compute-to-memory-access ratio)
-
GPU 计算单元利用率低(cannot highly utilize GPUs compute)
6.4.2 核心观察
GPTQ 的作者注意到:
-
列 i 的量化决策(rounding decision)只会受到该列自身更新的影响;不会受到未来(后面列)的更新影响。 即:当前列的舍入误差与未来列无关。
-
后续列的更新(later columns updates)在当前时刻其实是无关紧要的(irrelevant),可以暂时不执行。 因此可以先推迟(lazy)这些更新,一次性在后续批量完成。
6.4.3 解决方案 懒批量更新
为提高效率,GPTQ 不在每列量化后立即更新所有相关列,而是:
将若干列合并成一个 batch(列块)
在处理完该批次后,再一次性执行更新操作
数学表达为: \([ W_{:,(i+B)} = W_{:,(i+B)} - E \cdot G_{i:(i+B),(i+B)} ]\) 其中:
- ( W_{:,(i+B)} ):后续未量化列的权重;
- ( E ):量化误差矩阵;
- ( G ):Hessian 逆矩阵相关项;
- ( i:(i+B) ):表示该批量内的列范围。
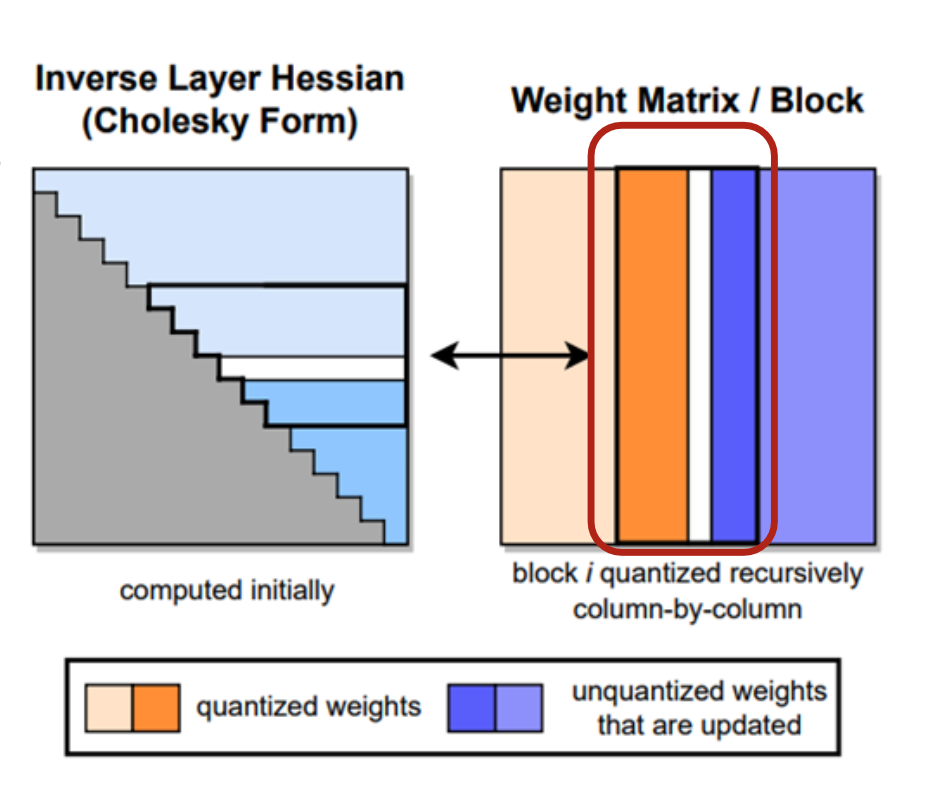
(a) 左图 — Inverse Layer Hessian (Cholesky Form)
灰色:初始计算完成;
蓝色:在量化时逐步更新;
表示 Hessian 的 Cholesky 结构,量化时只需访问部分子矩阵。
(b) 右图 — Weight Matrix / Block
橙色列:已量化的列;
蓝色列:尚未量化但被更新影响的列;
红色框:表示当前处理的“列块(batch of columns)”;
每次量化多个列(batch)后,才进行一次统一的权重更新
优点:
- 减少访存;
- 提高计算/访存比;
- GPU 利用率显著提升。
7 数值稳定性与 Cholesky 优化
7.1 数值问题(Numerical inaccuracies)
在大规模 LLM 的量化过程中,一个严重的问题是:
- 当层的 Hessian 维度极大时,其逆矩阵 ( H_F^{-1} ) 容易变得不稳定(indefinite);
- 即矩阵可能不再是正定的,从而导致量化更新过程中产生数值误差累积或数值溢出;
- 这会严重影响量化后的模型性能
7.2 关键观察(Observation)
在量化过程中,其实只需要从 ( H_F^{-1} ) 中提取非常有限的信息:
当量化某个权重 ( q ) 时, 仅需访问 ( H_F^{-1} ) 第 ( q ) 行(从对角线开始的部分)即可。
也就是说:
- 不需要完整存储或反复求逆整个 ( H_F^{-1} );
- 只需使用下三角部分(Lower-triangular)即可完成所有更新操作。
7.3 GPTQ 的优化策略
GPTQ 利用了 Cholesky 分解(Cholesky decomposition) 的数学特性: \(H = L L^{T} \quad \Rightarrow \quad H^{-1} = (L^{-1})^{T} L^{-1}\) GPTQ 在实现中:
- 使用 Cholesky 核函数(Cholesky kernels) 预先计算 ( H^{-1} ) 所需的信息;
- 将 Hessian 的逆运算转换为下三角矩阵分解与前向求解;
- 这样既能保持数值稳定,又不会显著增加显存消耗。
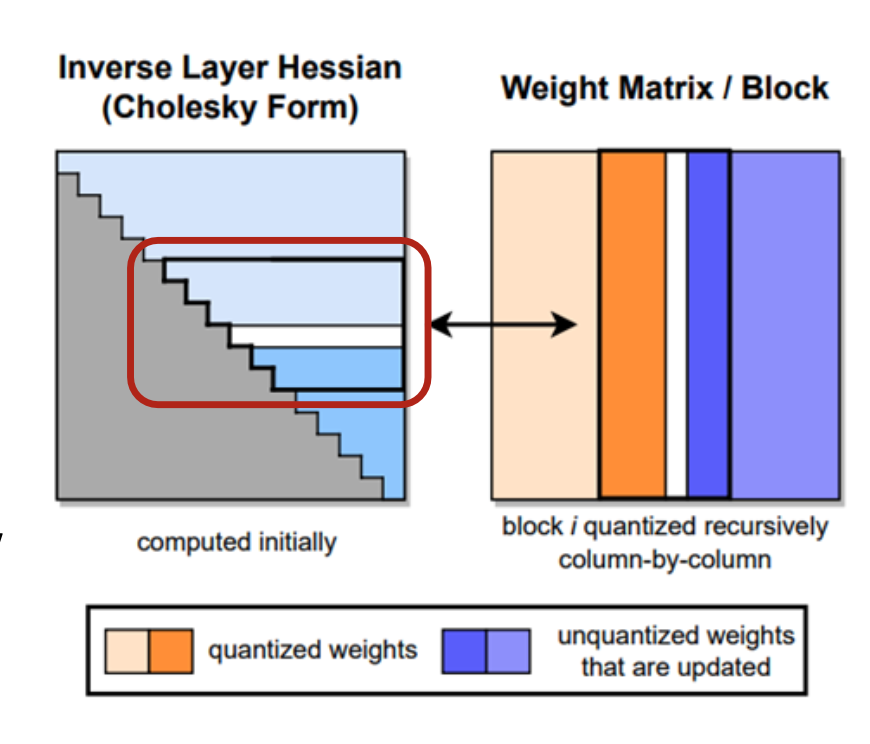
7.4 图示解读
-
左图(Inverse Layer Hessian / Cholesky Form)
- 灰色区域:初始计算完成的部分;
- 蓝色区域:在量化时动态访问;
- 红框:表示 Cholesky 分解中被访问的下三角子块。
-
右图(Weight Matrix / Block)
- 橙色:已量化权重;
- 蓝色:未量化但需要更新的权重列。
- 表示在逐列量化过程中,Cholesky 形式的 ( H_F^{-1} ) 提供稳定的误差补偿支撑。
8 GPTQ 代码实现
-
核心实现文件:
gptq.py